首頁(yè)>技術(shù)中心>技術(shù)資訊>高速開(kāi)關(guān)閥先導(dǎo)控制的電液位置系統(tǒng)設(shè)計(jì)
高速開(kāi)關(guān)閥先導(dǎo)控制的電液位置系統(tǒng)設(shè)計(jì)
發(fā)布時(shí)間:2017-11-22
液壓滑臺(tái)常用于機(jī)床實(shí)現(xiàn)進(jìn)給運(yùn)動(dòng)。研究表明,一般液壓系統(tǒng)控制的滑臺(tái)在定位過(guò)程中無(wú)法克服因摩擦力而造成穩(wěn)態(tài)誤差,同時(shí)會(huì)產(chǎn)生抖動(dòng)現(xiàn)象,但用電液位置伺服系統(tǒng)控制的液壓滑臺(tái)能夠滿足低速運(yùn)動(dòng)時(shí)高精度定位的需要[1-2]。工業(yè)上用于電液位置控制系統(tǒng)的核心元件有伺服閥、比例閥和高速開(kāi)關(guān)閥等。高速開(kāi)關(guān)閥由于具有極高的響應(yīng)速度、結(jié)構(gòu)緊湊、重復(fù)性好、工作耐久可靠、抗污染能力強(qiáng)以及價(jià)格便宜等諸多優(yōu)點(diǎn),引起了人們的廣泛關(guān)注和研究。但是,由于高速開(kāi)關(guān)閥工作流量偏小,不足以直接驅(qū)動(dòng)功率較大的液壓位置控制系統(tǒng)。因此需要研究改進(jìn)的辦法以使其能夠用于大流量、大功率的液壓位置系統(tǒng);采用高速開(kāi)關(guān)閥先導(dǎo)控制的方式既可以避免其輸出流量偏小的缺點(diǎn),同時(shí)又能保留其便于直接通過(guò)計(jì)算機(jī)控制的優(yōu)點(diǎn),是一種很有前途的、可行的電液位置控制系統(tǒng)方案。
1.新型電液位置控制系統(tǒng)的設(shè)計(jì)方案
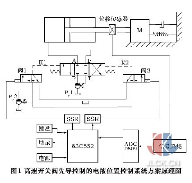
高速開(kāi)關(guān)閥先導(dǎo)驅(qū)動(dòng)的電液位置控制系統(tǒng)的結(jié)構(gòu)如圖1所示。
1.1工作原理
如圖1所示,該系統(tǒng)由兩個(gè)貴州紅林機(jī)械廠生產(chǎn)的HSV2333型高速開(kāi)關(guān)閥和一個(gè)三位四通液控?fù)Q向閥組成。系統(tǒng)采用單端驅(qū)動(dòng)方式,在此驅(qū)動(dòng)方式下,無(wú)論液壓缸活塞向哪個(gè)方向運(yùn)動(dòng),每個(gè)脈寬調(diào)制周期內(nèi)都只有一個(gè)高速開(kāi)關(guān)閥開(kāi)啟而另一個(gè)高速開(kāi)關(guān)閥關(guān)閉,當(dāng)控制誤差大于零時(shí),閥4開(kāi)啟,閥5關(guān)閉;當(dāng)控制誤差小于零時(shí),閥5開(kāi)啟,閥4關(guān)閉。每個(gè)閥的開(kāi)啟與關(guān)閉狀態(tài)都取決于誤差的正負(fù),而誤差數(shù)值的大小決定了該閥輸出的平均流量大小,即輸入到高速開(kāi)關(guān)閥678信號(hào)的占空比的大小。在每個(gè)脈寬調(diào)制周期內(nèi),對(duì)于該控制系統(tǒng)的控制量(作用在各高速開(kāi)關(guān)閥的脈寬調(diào)制信號(hào)的寬度),每個(gè)閥彼此獨(dú)立,都有自己的工作狀態(tài)。單端導(dǎo)通方式具有有效利用能源的優(yōu)點(diǎn),且控制方法簡(jiǎn)單。
當(dāng)單片機(jī)未輸出控制信號(hào)時(shí),兩個(gè)高速開(kāi)關(guān)閥4和5接通9口泄出壓力油,同時(shí)6口封閉。此時(shí)滑閥在兩端彈簧的作用下處于中位(8型中位機(jī)能),接通滑閥的6口和9口為泵卸荷,而:、;口封閉,系統(tǒng)保壓,維持液壓缸兩腔的壓力。當(dāng)高速開(kāi)關(guān)閥4有678信號(hào)輸入時(shí),高速開(kāi)關(guān)閥的控制口6口接通<4,產(chǎn)生平均流量,壓力油送入液控?fù)Q向閥的左端,推動(dòng)閥芯向右移動(dòng),液控?fù)Q向閥內(nèi)的對(duì)中彈簧產(chǎn)生反向壓力并逐漸增大,當(dāng)達(dá)到預(yù)定開(kāi)口度時(shí)閥芯停止,此時(shí)高速開(kāi)關(guān)閥5無(wú)信號(hào)輸入,右端壓力油可通過(guò)<5油,主液壓泵604的油液經(jīng):口送入液缸左腔,活塞桿右行,完成對(duì)液壓缸的控制。由于高速開(kāi)關(guān)閥通過(guò)678信號(hào)的改變可實(shí)現(xiàn)成比例的輸出控制壓力油,因此,能很方便地實(shí)現(xiàn)對(duì)滑閥開(kāi)口量的控制,從而實(shí)現(xiàn)對(duì)液壓缸的連續(xù)比例控制。液壓缸活塞左行運(yùn)動(dòng)系統(tǒng)控制原理相同,故不再描述[3]。
1.2單片機(jī)控制單元
該系統(tǒng)采用飛利浦公司生產(chǎn)的單片機(jī)830552作為核心控制器,該單片機(jī)是80051系列單片機(jī)的改進(jìn)型號(hào),兼容80051指令系統(tǒng),除提供了80051標(biāo)準(zhǔn)的功能以外,還提供了適應(yīng)十儀器儀表、土業(yè)控制、汽車(chē)控制、特殊馬達(dá)管理、變速箱控制等實(shí)時(shí)一應(yīng)用領(lǐng)域的令用功能部件LaJ。內(nèi)部包含有:8k字節(jié)ROM程序存貯器;256字節(jié)RAM數(shù)據(jù)存貯器;6個(gè)8位I/0 I 1;2個(gè)16位定時(shí)一器/事件i「數(shù)器;1個(gè)附加的配置捕捉和比較寄存器的16位定時(shí)一器;2路8位精度的脈沖寬度調(diào)制輸出PWM I 1;2個(gè)串行II(異步串行II和I2C總線);15個(gè)中斷源和2個(gè)中斷優(yōu)先級(jí)嵌套的中斷系統(tǒng)。
系統(tǒng)由83 0552的脈沖寬度調(diào)制PWM輸出II輸出兩路PWM信號(hào)分別控制高速開(kāi)關(guān)閥1和2的開(kāi)啟和關(guān)閉,并通過(guò)預(yù)分頻控制寄存器(PWMP)和PW MO和PWM1寄存器的比較輸出不同占空比的脈沖信號(hào),以此調(diào)節(jié)高速開(kāi)關(guān)閥的平均輸出流量。由十單片機(jī)的PWM引腳輸出信號(hào)功率有限,不足以直接驅(qū)動(dòng)高速開(kāi)關(guān)閥,為此選用了直流型固態(tài)繼電器(SSR)作為功率驅(qū)動(dòng)兒件,實(shí)現(xiàn)PWM信號(hào)的功率放大。固態(tài)繼電器(SSR)是電子繼電器,它的輸入端和輸出端之間有光電隔離。由十其內(nèi)部無(wú)運(yùn)動(dòng)部件,故無(wú)振動(dòng),無(wú)沖擊噪聲,它的開(kāi)關(guān)速度很快,通常小十10 },s,可直接由TTL或CMOS邏輯控制,滿足木系統(tǒng)的要求。系統(tǒng)位移傳感器反饋的模擬位移信號(hào)選用ADC0809進(jìn)行模數(shù)轉(zhuǎn)換,ADC0809型是8位精度全MOS A/D轉(zhuǎn)換器。片內(nèi)有三態(tài)數(shù)據(jù)輸出鎖存器,與微處理器兼容,輸入方式為單通道,轉(zhuǎn)換時(shí)一間約為100 },s>'};的非線性誤差為1 1 LSB,土作電壓為+5 Vo通過(guò)ADC0809,位移傳感器的位移反饋信號(hào)被送入單片機(jī)形成偏差信號(hào),進(jìn)而控制整個(gè)系統(tǒng)。
2 結(jié)語(yǔ)
為提高液壓滑臺(tái)的控制精度及穩(wěn)定性,利用高速開(kāi)關(guān)閥可實(shí)現(xiàn)連續(xù)比例調(diào)節(jié)控制的特點(diǎn),提出了高速開(kāi)關(guān)閥先導(dǎo)控制,液控?fù)Q向閥作為功率放大級(jí)的電液位置控制系統(tǒng)的設(shè)i}一方案,與傳統(tǒng)機(jī)液系統(tǒng)相比,該電液位置控制系統(tǒng)便十i}一算機(jī)控制,可柔性調(diào)整參數(shù),容易獲得較好的動(dòng)靜態(tài)特、土作穩(wěn)定可靠。
摘自:中國(guó)計(jì)量測(cè)控網(wǎng)






