首頁>技術(shù)中心>技術(shù)資訊>磁阻傳感器在轉(zhuǎn)速測量中的應(yīng)用
磁阻傳感器在轉(zhuǎn)速測量中的應(yīng)用
發(fā)布時間:2017-11-22
1 引言
測量齒輪轉(zhuǎn)速的方法很多, 但在應(yīng)用中大都有其局限性。例如, 霍爾傳感器由于靈敏度的限制, 與轉(zhuǎn)動齒輪的間距在 1mm 左右, 當(dāng)齒輪高速運(yùn)轉(zhuǎn)時, 因機(jī)械振動, 傳感器容易與齒輪發(fā)生碰撞, 安全性較差。磁敏電阻齒輪傳感器不能測量非常低的轉(zhuǎn)速, 因?yàn)檫@時傳感器可能檢測不到轉(zhuǎn)速信號。這兩種方法一般還需要安裝高磁場強(qiáng)度的磁鋼, 對齒輪的運(yùn)轉(zhuǎn)以及周圍的環(huán)境會造成一定的影響。在存放這類產(chǎn)品時, 還要注意防止磁化。光電編碼盤測轉(zhuǎn)速對環(huán)境要求很高, 當(dāng)油污或粉塵比較嚴(yán)重時, 測量的可靠性會大大降低。磁阻傳感器具有很高的磁場檢測靈敏度, 可以測量微弱的磁場, 用磁阻傳感器設(shè)計(jì)齒輪轉(zhuǎn)速傳感器具有測量精度高、范圍寬, 測量間距大等明顯的優(yōu)勢。本文介紹的轉(zhuǎn)速測量方法選用 Honeywell 公司生產(chǎn)的各向異性磁阻傳感器 HMC1021S 做磁敏探頭。它是一種四段橋式結(jié)構(gòu)的磁阻傳感器, 與三端通用型半橋結(jié)構(gòu)的磁阻傳感器相比較, 具有靈敏度高、體積小、價(jià)格低、工作頻率高等優(yōu)點(diǎn)。磁場由 φ30mm 的線圈產(chǎn)生, 該線圈所產(chǎn)生的磁場較弱, 對周圍的工作環(huán)境影響很小。斷電后所產(chǎn)生的磁場消失, 不會對環(huán)境造成任何影響。由于磁阻傳感器的靈敏度高, 且線圈所產(chǎn)生的磁場大小可調(diào), 傳感器探頭與測速齒輪的間距可以在較大范圍內(nèi)調(diào)整。此種傳感器多個放在一起也不會造成磁化。
2 測速原理及傳感器探頭的設(shè)計(jì)
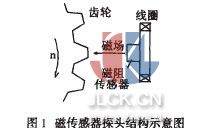
圖1 為傳感器探頭結(jié)構(gòu)示意圖。在外徑為30mm,內(nèi)徑為23mm, 厚度為3mm 的凹槽空心骨架上, 用0.2mm 的漆包線繞195 圈制成探頭的激勵線圈。當(dāng)線圈兩端加上某一頻率的電壓時, 線圈內(nèi)產(chǎn)生周期性變化的電流, 會使周圍產(chǎn)生交變磁場。HMC1021S 磁阻傳感器置于線圈平面中心處, 用來檢測齒輪轉(zhuǎn)動時的磁場變化。該磁阻傳感器采用 8 腳 SOIC 封裝, 體積小,內(nèi)部由4 只磁敏電阻構(gòu)成了一個橋路。主要參數(shù)有: 電橋電壓典型值5V, 最大值 12V; 磁場范圍±6 Gauss; 分辨率 85μGauss; 靈敏度典型值1mV/V/Gauss; 帶寬 0~5MHz, 工作溫度- 40~125℃。因?yàn)檫@里磁阻傳感器不是用來精確測量磁場的大小, 其輸出電壓與磁場的關(guān)系不必呈很好的線性, 所以磁場范圍可以擴(kuò)展到±10Gauss。
當(dāng)齒輪轉(zhuǎn)動時, 由于氣隙處的磁力線發(fā)生變化,磁路中的磁阻也隨之改變, 從而可在傳感器中產(chǎn)生變化的電信號。齒輪的每個輪齒經(jīng)過磁阻傳感器時, 都會使其產(chǎn)生一個輸出信號, 經(jīng)處理變?yōu)槊}沖信號, 由單片機(jī) AT89C51 讀入該脈沖并計(jì)算出轉(zhuǎn)速數(shù)據(jù), LED數(shù)碼顯示測量結(jié)果。此外, 由于磁阻傳感器具有很強(qiáng)的方向性, 該傳感器探頭對齒輪的轉(zhuǎn)動十分敏感, 而對齒輪沿軸向的抖動不敏感。這對保證測速精度十分有利。
3 高精度轉(zhuǎn)速測量方法
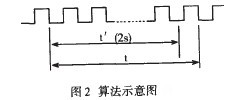
常用的轉(zhuǎn)速測量算法有測頻率法(M法)和測周期法(T 法) 。M法最大會產(chǎn)生±1 個測速脈沖的誤差, 適用于高轉(zhuǎn)速測量場合, T 法中時間的最大測量誤差為±1 個時鐘脈沖周期, 適用于低轉(zhuǎn)速測量場合。這里采用一種新的算法。它結(jié)合 M法和 T 法的特點(diǎn), 克服了這兩種算法的缺點(diǎn)。具體算法如圖2 所示。每到固定的時間t′(取 t′=2s)后, 以下一個脈沖的下降沿為記錄時刻, 此時計(jì)數(shù)器剛好記錄上這一脈沖, 同時引起 INT0 中斷。在 INT0 中斷程序里, 從 T1 計(jì)數(shù)器取出計(jì)數(shù) N, 從定時器T0 中取出計(jì)數(shù)器記錄N 個脈沖所需要的時間t, 從而計(jì)算出轉(zhuǎn)速脈沖頻率 f=N/t。設(shè)齒輪齒數(shù)為z, 則齒輪轉(zhuǎn)速 n=60N/zt。這種算法與測頻率法比較, 它不是在固定時間t′=2s 到的時刻, 取出計(jì)數(shù)器中的計(jì)數(shù)值N, 進(jìn)行 N/ t′計(jì)算, 而是要等下一個脈沖剛好到后, 再進(jìn)行N/t 的計(jì)算, 這就解決了測頻率法可能有一個測速脈沖誤差的問題。這種算法與測周期法比較, 它不是在測速脈沖的一個周期 T 內(nèi)記錄時鐘脈沖( 頻率f0) 的個數(shù) m 后,就立刻進(jìn)行 T =m/f0 的計(jì)算。而是要等 t≥t′后, 再取出計(jì)數(shù)器中確切個脈沖N 進(jìn)行N/t 的計(jì)算, 這就解決了測周期法當(dāng)轉(zhuǎn)速較高, 計(jì)算時間太短, 最大測量時間誤差為±1 個時鐘脈沖的問題。
4 系統(tǒng)硬件組成
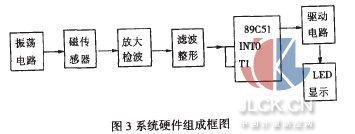
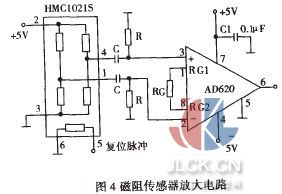
系統(tǒng)硬件組成框圖如圖3 所示。振蕩電路產(chǎn)生50kHz 的電壓信號輸入傳感器線圈作為激勵信號, 磁阻傳感器輸出電壓經(jīng)放大、檢波和低通濾波, 再由整形電路變換為矩形波, 輸入 89C51 單片機(jī)計(jì)算出轉(zhuǎn)速, 由 P0 口輸出, 5 位 LED 數(shù)碼顯示計(jì)算結(jié)果。磁阻傳感器輸出電壓放大電路如圖 4 所示。圖中AD620 是低功耗高精度寬頻帶儀表放大器, 增益為100 時, 帶寬 120kHz。可以在頻率為50kHz 的情況下,滿足電壓放大倍數(shù)的要求。通過調(diào)節(jié)管腳1 和8 之間的外接電阻RG 可以改變增益, 電壓增益Au=1+49.4kΩ/RG。本設(shè)計(jì)中 RG 由200Ω的固定電阻R 和470Ω的電位器RW 串聯(lián)構(gòu)成。當(dāng)傳感器與齒輪間距變化時, 可適當(dāng)調(diào)整RW 以改變增益。R 和C 組成無源高通濾波器, 其作用是交流耦合, 可以避免由于任何原因的直流強(qiáng)磁場信號等造成放大器輸出的飽和。
由于傳感器的線圈中 50kHz 的激勵信號在周圍產(chǎn)生了交變磁場, 磁阻傳感器的電壓輸出中含有相應(yīng)的50kHz 載波信號, 它比轉(zhuǎn)速信號頻率大得多。例如,當(dāng)齒輪高速運(yùn)轉(zhuǎn)6000r/min,即 100r/s 時, 假設(shè)齒輪齒數(shù)z=60, 則轉(zhuǎn)速信號頻率為 6kHz。通過低通濾波器可以濾除 50kHz 信號。濾波電路的設(shè)計(jì)同時考慮了干擾信號的消除, 以保證計(jì)數(shù)值可靠。整形電路采用遲滯電壓比較器, 把放大后的模擬轉(zhuǎn)速信號轉(zhuǎn)變成可用于計(jì)數(shù)的矩形波信號。
5 實(shí)驗(yàn)數(shù)據(jù)
對一齒數(shù)為60, 模數(shù)為3 的齒輪進(jìn)行轉(zhuǎn)速測量。磁傳感器探頭與齒輪間距10mm, 測量范圍0~6000 r/min。測量數(shù)據(jù)如表1 所示。測量準(zhǔn)確度為0.02%FS。本設(shè)計(jì)的轉(zhuǎn)速測量方法, 采用 Honeywell 公司的HMC 系列高靈敏度磁阻傳感器作磁敏元件。測量準(zhǔn)確度高, 測量范圍寬, 傳感器探頭與齒輪間距可以在較大的范圍內(nèi)調(diào)整, 安裝使用方便。用線圈產(chǎn)生磁場, 代替通常所使用的磁鋼, 磁場大小可調(diào), 對工作環(huán)境影響小, 斷電后磁場消失, 不影響環(huán)境。

摘自:中國計(jì)量測控網(wǎng)






