大負荷壓電式力標準機
發布時間:2017-11-22
引言
疊加式力標準機是利用力源對串聯同軸安裝的標準傳感器和被檢傳感器施加負荷,根據配套標準測力儀的標準數來確定被檢測力儀的各項計量性能指標的標準測力裝置。由于作為承載和測力元件的傳感器受到的負荷是彈性力,所以在選用了足夠高精度的標準測力儀之后,力源施力裝置能夠控制作用于傳感器上的微量位移能力決定著力標準機的力值計量精度和使用性能[1]。傳統的疊加式力標準機均采用機械或液壓的傳動方式對設備實施加載。載荷在500kN以下的可以采用壓電微位移裝置實現力值精密跟蹤控制。研究1MN以上超大載荷能力的疊加式力標準機的加載與控制問題,提出并采用液壓和壓電微位移技術相結合的方法,定義采用壓電微位移技術的疊置加荷式力標準機為壓電式力標準機。
1系統組成和工作原理
壓電式力標準機的力源施力裝置設計成由粗加載和精密加載兩個有機部分組成的系統(見圖1),分別通過控制較大位移完成施加某級載荷的大部分任務和通過控制微量位移實現力值的精確控制。由于載荷非常大(大于1MN),粗加載系統是采用液壓傳動方式產生位移對測力系統施加負荷的裝置,精密加載則由壓電陶瓷力發生裝置[3]完成。
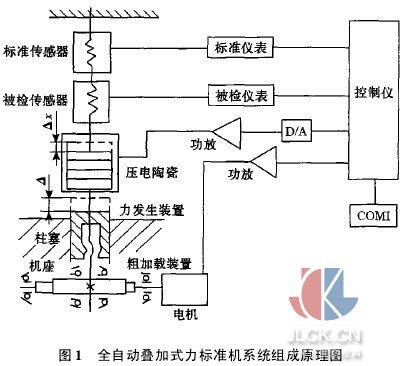
由圖1可見,本壓電式力標準機可以分成5個組成部分,即主機、壓電陶瓷力發生裝置(壓電陶瓷微位移裝置)、控制器和工作儀表以及數據處理系統。其中主機包括機架(機器的結構主體)、驅動機構(用以實現粗加載的液壓傳動系統),控制器,工作儀表包括配套標準測力儀(標準傳感器和指示儀表)和被檢測力儀。
壓電陶瓷力發生裝置是建立在物理學中的逆壓電效應[6]原理基礎之上的為位移輸出裝置[3]。作為力值精密調節器,它與標準傳感器和被測傳感器一起串聯安裝于測力系統中。當力標準機工作時,在施加粗負荷后,通過特殊研制的控制裝置控制施加于壓電陶瓷力發生裝置上的電場強度,改變它產生的微小變形量,從而達到精密控制調節力值的目的。控制裝置運用微型計算機和微電子控制技術,以標準測力儀的輸出作為反饋信號,實現對施加負荷和力值穩定調節的閉環自動控制和工作過程自動化。
由于壓電陶瓷力發生裝置可以產生易于控制的非常微小的位移量作用于測力系統中,通過微機自控技術精密跟蹤標準力值,實現了精確施加力值和長時間保持穩定不變的目標。同時,由于運用上述先進技術,簡化了設備的結構,實現了工作過程自動化,使設備工作精度、效率和可靠性大幅度提高,成本顯著降低,操作十分方便。
2主機結構組成問題
力標準機的主機是負荷的承受體和施力執行裝置。標準的和被檢的測力儀正確地安裝于主機上之后,由控制器控制施力執行機構工作,以完成測力試驗任務。主機的機架必須在規定的負荷范圍內能夠保證測力儀(傳感器)的正確受力作用位置,以保證測量精度[5]。
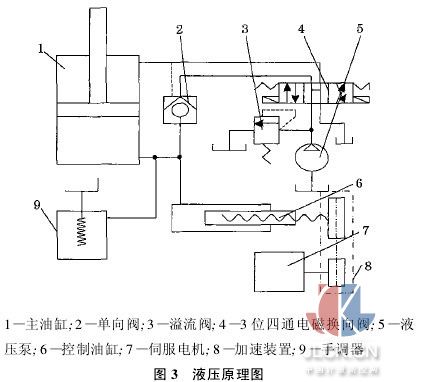
主機中的驅動機構是力標準機粗加載過程的執行機構。超大負荷壓電式力標準機采用由控制電動機驅動的液壓傳動系統完成加荷工作,如圖2所示。考慮到加載工作過程中所需要的位移輸出主要用于克服標準和被測傳感器,以及系統結構等主要環節的變形,每個環節的變形量一般都在1 mm水平,故此加載油缸所需要有效的輸出一般在3~5 mm的范圍內。因而實際采用了1個結構極其簡單的最小液壓系統,主要工作系統是1個由控制油缸和主油缸組成的帕斯卡連通器。主油缸的直線位移輸出完全由伺服電機驅動控制油缸的直線運動實現。液壓傳動實現了高效率力放大,伺服電機控制技術成熟,易于實現精確位置控制。
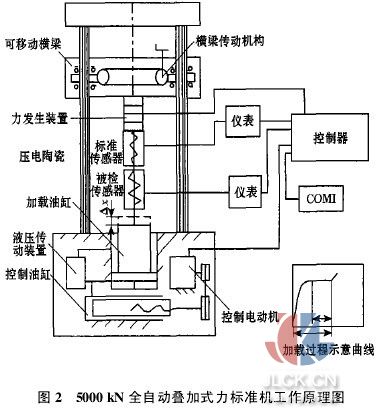
主要動作與實現方法為:橫梁升降,可由橫梁升降機構實現大范圍橫梁升降;主油缸升降,可由液壓油泵通過換向閥帶動油缸活塞升降,升程0~100 mm;粗加載由控制電機驅動控制油缸柱塞作往復直線運動,利用液壓放大原理驅動加載油缸實現對傳感器系統的加載。加載油缸的輸出推力W.

式中:A1為加載油缸的無桿腔面積;A2為控制油缸的柱塞斷面積;W1為控制油缸的柱塞承受的載荷;F為由于加載油缸的摩擦和有桿腔的液壓作用力而產生的阻力。
因此,采用由伺服電機系統驅動的最小液壓傳動系統實現超大負荷能力力標準機的粗加載,具有結構簡單、位移控制方便精確的特點。
3超大負荷能力壓電陶瓷力發生裝置
建立在逆壓電效應基礎上的壓電陶瓷微位移器(如圖4),在當作用于器件上的作用力均勻分布在器件表面上時,它的輸出位移可用下式表示[1]:

式中:δ為壓電陶瓷微位移器的輸出位移;p′為壓電陶瓷微位移器受到的作用力;l為每片壓電陶瓷晶片的厚度;d33為壓電應變常數; U3為受力方向上施加的電壓;S為壓電陶瓷晶片的面積;n為壓電陶瓷晶片層數;s33為壓電陶瓷晶片極化方向上的彈性柔順常數。可見壓電陶瓷微位移器的輸出位移與壓電陶瓷晶片的材料、性質、體積、外加電壓及作用力有關。
為了增大輸出位移,可以選用d33較大的材料,增加晶片層數n,提高輸入電壓U3,增大器件受力面積。由于外部作用力的原因,微位移器的輸出位移可能是負值,即器件的尺寸小于自由狀態的尺寸,這是由于器件本身的變形所致。微位移器的輸出位移拋除受外力作用下器件本身的變形后,才可能會有輸出位移與輸入電壓成正比的關系。
在非均布載荷狀態下,假設晶片材質是均勻的,外加電壓也是均勻的,根據積分學原理,器件上任意點處的位移輸出可以根據式(1)表示為

受制作工藝條件的限制,單晶片尺寸大小有限,因此為了承受極大載荷,壓電陶瓷微位移器件必須是多組組合結構,如圖5所示。
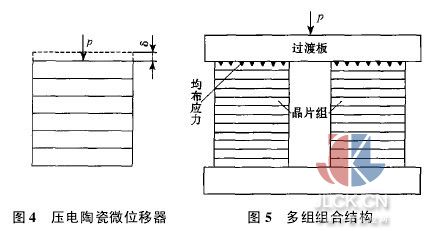
根據力學原理[4],在多組組合結構中,只要保證外力向晶片的正確傳遞方式,以及晶片的應力分布狀態合理,保證器件強度,可以設計制作出承受幾乎任何載荷的微位移裝置。根據上述分析可知:
(1)施加外部電壓情況下,器件的應力可能為0,即外部電壓可以有利于承載能力的提高。
(2)最大應力產生在外加電壓為0或者外加電壓很高的情況下。當外加電壓產生的器件變形(位移)不足以抵消由于外力作用而使器件產生的變形時,只按電壓為0時計算器件的強度即可。一般來說,器件施加的最高電壓只取決于擊穿場強。
(3)施加負電壓時等于增加了外部作用力,所以承受大負荷的微位移器不宜施加負電壓。
(4)載荷越大輸出位移越小。但不同恒定載荷作用下,相對位移不變。
(5)通過正確的結構設計,保證器件強度,可以設計制作出承受幾乎任何載荷的微位移裝置。
4系統控制與實現
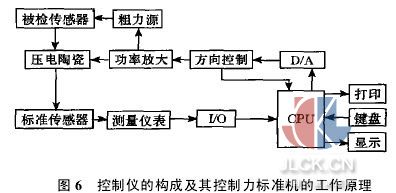
確定了結構和控制執行器件,力標準機的工作性能取決于控制方法和控制器。控制器是一個采用單片微機作為中央控制器的控制裝置,內含控制電機驅動信號電路、壓電陶瓷力發生裝置控制電路,信號處理、反饋控制電路等。控制儀的構成和它控制力標準機工作的原理如圖6所示。工作時,按照程序和控制參數,以標準測力儀的輸出作為反饋信號,它控制測力機上的粗加載裝置(粗力源,由電動機驅動)首先施加力值,當達到壓電陶瓷力發生裝置的調整范圍之后,則將控制轉向力值微調穩定。它通過控制電路控制作用于壓電陶瓷力發生裝置上的電場強度大小,改變其產生的變形量,從而實現對力值的精密跟蹤控制,并完成對被檢儀表的測試記錄和處理工作。測量的數據和處理的結果送顯示器、存貯器和其他輸出裝置。控制器與微機聯接構成全自動微機控制系統。
通過控制作用于壓電陶瓷力發生裝置上的電場強度大小實施力值調節,由于電子技術對于電場強度控制即電壓控制可以達到極高的水平[2],因此,力值調節的精密度完全取決于標準測力儀的輸出信號的分辨率。數據處理系統可以按照國家標準規定的方法和格式對數據進行處理、顯示、存貯和打印。具有方便、直觀、準確、快速、標準和便于存貯的數據處理效果。
5應用與結論
研制出了超大負荷能力壓電微位移裝置和伺服電機控制最小液壓工作系統為基礎的壓電式力標準機,實現了設備的高性能、低成本。經在1 MN、2 MN等多臺設備上使用,所提出的方法和研制的設備主要性能指標如下:
(1)測力誤差:<0.02%(與用戶選用的標準測力儀的精度有關);
(2)力值調節靈敏度:標準儀表的1個讀數(1 D);
(3)力值波動度:<0.003%;
(4)力值穩定時間:任意;
(5)可以實現的檢測項目:負荷傳感器及其他測力儀的非線性、重復性、滯后和蠕變等;滿足用戶對檢驗項目、數據處理方法等的特殊要求;
(6)工作方式:工作過程自動化,包括自動施加載荷,自動控制和穩定力值的大小,自動采集和處理數據,并打印輸出;
(7)遵循標準:對測力和稱重傳感器的檢測符合國家有關標準和OIML R60的要求;
(8)工作效率:該力標準機遵循OIML R60對傳感器在試驗過程中加荷時間的要求。(蠕變試驗加荷時間除外)。但為滿足負荷傳感器生產者高效率的要求,可在滿足一定精度要求的前提下,對傳感器進行快速試驗。除自動工作方式外,BFSM力標準機還可以用手動方式工作;
(9)適用環境:BFSM力標準機只需一處平整地面即可安裝,適于在OIML R60中規定的傳感器試驗環境中使用。設備和技術的主要特點:
(1)獨創壓電陶瓷驅動的納米位移控制技術,力值準確度和控制穩定度高。
(2)選用合適儀表可獲得從零到額定載荷的全范圍覆蓋。例如500kN力標準機可用以檢測100N的傳感器。不但適合于傳感器的大批量生產,也適合于中小型企業、計量檢定部門的多品種單件小批量生產。
(3)采用高精度滾珠絲杠,伺服電動機驅動的液壓傳動系統,結構簡單,價格低,體積小。使用、維護簡單可靠,不存在漏油現象。
(4)在Windows界面下操作力標準機,工作狀態、試驗數據實時顯示和處理自動化。
(5)具有進行傳感器所有負荷特性試驗的功能,可實現快速和交變及其他特殊試驗;自帶反向器,可用壓式標準傳感器檢測拉式傳感器。
(6)工作空間大,可以安放高低溫實驗箱。
摘自:中國計量測控網






