首頁(yè)>技術(shù)中心>技術(shù)資訊>基于虛擬儀器的質(zhì)量流量計(jì)相位差測(cè)量
基于虛擬儀器的質(zhì)量流量計(jì)相位差測(cè)量
發(fā)布時(shí)間:2017-11-22
引言
質(zhì)量流量計(jì)是一種直接測(cè)量流體質(zhì)量流量的儀器,它是通過(guò)檢測(cè)兩路同頻信號(hào)的相位差,從而利用相應(yīng)的數(shù)學(xué)公式計(jì)算出流體的質(zhì)量流量。傳統(tǒng)電子模擬式相位差測(cè)量由硬件電路完成,電路的溫漂、噪聲及干擾信號(hào)的影響,都會(huì)導(dǎo)致測(cè)量結(jié)果產(chǎn)生誤差[1-2]。隨著計(jì)算機(jī)技術(shù)和虛擬儀器技術(shù)的發(fā)展,利用虛擬儀器可以很好的完成相位差的測(cè)量,同時(shí)避免用硬件電路測(cè)量時(shí)所帶來(lái)的一些影響,從而提高測(cè)量精度。
虛擬儀器相位差測(cè)量常用的方法有:過(guò)零法、相關(guān)法、頻譜分析法等[3-7]。由于傳感器輸出的信號(hào)是頻率和幅值不斷變化的近似正弦脈沖波的信號(hào),用相關(guān)法和頻譜分析法不能很好的測(cè)量相位差,而用傳統(tǒng)的過(guò)零法雖能測(cè)量相位差,但對(duì)于實(shí)際信號(hào)零點(diǎn)的查找比較困難,針對(duì)傳感器輸出的實(shí)際信號(hào),本文提出了一種基于虛擬儀器的改進(jìn)型過(guò)零點(diǎn)相位差測(cè)量法。
1虛擬儀器相位差測(cè)量系統(tǒng)
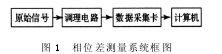
虛擬相位差測(cè)量系統(tǒng)由傳感器、信號(hào)調(diào)理電路、數(shù)據(jù)采集卡、計(jì)算機(jī)等幾部分組成。系統(tǒng)框圖如圖1所示。其中計(jì)算機(jī)平臺(tái)通過(guò)LabVIEW編程控制數(shù)據(jù)采集卡采集信號(hào),并對(duì)采集進(jìn)來(lái)的數(shù)字信號(hào)進(jìn)行一系列處理,完成相位差的測(cè)量。
2過(guò)零法原理
2.1測(cè)量原理[3-5]
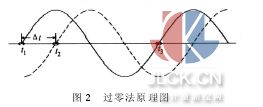
過(guò)零法是通過(guò)計(jì)算2個(gè)同頻信號(hào)過(guò)零時(shí)刻的時(shí)間差,再將時(shí)間差轉(zhuǎn)換為相位差。其基本原理如圖2所示。
3改進(jìn)的過(guò)零法原理
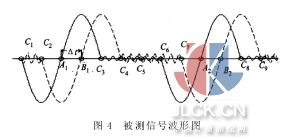
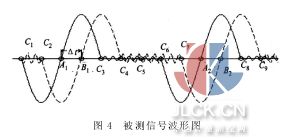
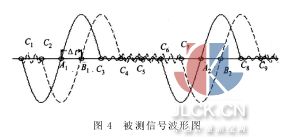
用前面的過(guò)零法能夠很好的測(cè)量常見(jiàn)波形的相位差,但對(duì)實(shí)際工作中遇到的信號(hào)如圖4所示,過(guò)零法不能很好的判斷實(shí)際計(jì)算需要的過(guò)零點(diǎn),因而不能測(cè)量出相位差。針對(duì)這種情況,提出了一種設(shè)定閾值的過(guò)零點(diǎn)相位差測(cè)量法。
3.1測(cè)量原理
測(cè)量的基本原理與前面所述基本相同,就是計(jì)算2個(gè)同頻信號(hào)過(guò)零時(shí)刻的時(shí)間差,再將時(shí)間差轉(zhuǎn)換為相位差。而在虛擬儀器中,兩同頻信號(hào)過(guò)零時(shí)刻的時(shí)間差,是由兩過(guò)零點(diǎn)所在數(shù)組中對(duì)應(yīng)位置差來(lái)確定的。所以前面的計(jì)算公式可以轉(zhuǎn)化為:
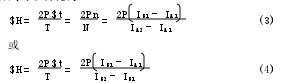
式中:Δθ為兩信號(hào)的相位差,IA1為過(guò)零點(diǎn)A1在數(shù)組1中所對(duì)應(yīng)的位置(即該點(diǎn)在數(shù)組1中的索引值),IA2為過(guò)零點(diǎn)A2在數(shù)組1中所對(duì)應(yīng)的位置(即該點(diǎn)在數(shù)組1中的索引值),IB1為過(guò)零點(diǎn)B1在數(shù)組2中所對(duì)應(yīng)的位置(即該點(diǎn)在數(shù)組2中的索引值),IB2為過(guò)零點(diǎn)B2在數(shù)組2中所對(duì)應(yīng)的位置(即該點(diǎn)在數(shù)組2中的索引值)。數(shù)組1和數(shù)組2分別為數(shù)據(jù)采集卡采集進(jìn)來(lái)的2路信號(hào)A、B的數(shù)值,采集卡應(yīng)使用并行采集卡,保證同時(shí)采集而無(wú)時(shí)間差,否則應(yīng)對(duì)結(jié)果進(jìn)行修正。
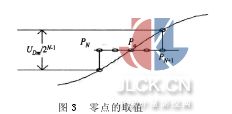
3.2設(shè)定閾值的過(guò)零點(diǎn)判斷
如圖5所示,信號(hào)中A1、A2、B1、B2四個(gè)過(guò)零點(diǎn)為計(jì)算需要的零點(diǎn),而其它過(guò)零點(diǎn)為干擾點(diǎn)。如果直接進(jìn)行過(guò)零點(diǎn)查找并計(jì)算,則會(huì)連同干擾點(diǎn)一并計(jì)算,出現(xiàn)測(cè)量錯(cuò)誤。因此,進(jìn)行零點(diǎn)查找判斷時(shí),應(yīng)預(yù)先設(shè)定一閾值δ,由于信號(hào)的幅值是變化的,而且在正弦脈沖之間的跳動(dòng)值也是變化的,因此,閾值δ的設(shè)定應(yīng)滿足以下2個(gè)條件:(1)閾值應(yīng)大于信號(hào)脈沖在波谷處的最大值Umax(即波谷處絕對(duì)值最小的一個(gè));(2)閾值應(yīng)小于信號(hào)在干擾段處的最小值Umin(即在干擾為負(fù)數(shù)時(shí)候絕對(duì)值最大的一個(gè))。圖5中,只有閾值2為正確的設(shè)定值。閾值設(shè)定公式為:Umax<δ
3.3相位差移位計(jì)算
通過(guò)零點(diǎn)查找找到所需零點(diǎn)在數(shù)組中的索引值后,由式(3)或者式(4)可以計(jì)算出2路信號(hào)的相位差。

但是,當(dāng)出現(xiàn)如下2種的情況:(1)如圖7(a)所示,采集進(jìn)來(lái)的A路信號(hào)的第1個(gè)零點(diǎn)A1之前的值都大于閾值,因此算法找不到A1點(diǎn),而查找到的第1個(gè)零點(diǎn)實(shí)際上是數(shù)組中1的第2個(gè)零點(diǎn)A2。而在B路信號(hào)的第1個(gè)零點(diǎn)B1之前可以找到閾值,因此能夠找到數(shù)組2的第1個(gè)零點(diǎn)B1。(2)如圖7(b)所示,采集進(jìn)來(lái)的A路信號(hào)的零點(diǎn)是從A2開(kāi)始的,而B(niǎo)路信號(hào)的零點(diǎn)從B1開(kāi)始的。此時(shí),如果用式(3)或式(4)計(jì)算相位差,會(huì)出現(xiàn)錯(cuò)誤.。
因此,當(dāng)判斷出現(xiàn)上述2種情況后(即查找到的A路信號(hào)的第1個(gè)零點(diǎn)在數(shù)組中1中的索引值大于查找到的B路信號(hào)的一個(gè)零點(diǎn)在數(shù)組2中的索引值時(shí)),應(yīng)該用查找到的B路信號(hào)的第2個(gè)零點(diǎn)與查找到的A路信號(hào)的第1個(gè)零點(diǎn)為一組進(jìn)行計(jì)算,即把查找到的B路信號(hào)的零點(diǎn)依次向前移位來(lái)與A路信號(hào)的零點(diǎn)配對(duì)計(jì)算。因?yàn)樵谫|(zhì)量流量計(jì)輸出信號(hào)中,A路信號(hào)總時(shí)超前于B路信號(hào)。其計(jì)算公式變?yōu)?
式中:Δθ為兩信號(hào)的相位差,IA1為查找到的A路信號(hào)第一個(gè)過(guò)零點(diǎn)在數(shù)組1中所對(duì)應(yīng)的位置(即該點(diǎn)在數(shù)組1中的索引值),IA2為查找到的A路信號(hào)第2個(gè)過(guò)零點(diǎn)在數(shù)組中1中所對(duì)應(yīng)的位置(即該點(diǎn)在數(shù)組1中的索引值),IB1為查找到的B路信號(hào)第1個(gè)過(guò)零點(diǎn)在數(shù)組2中所對(duì)應(yīng)的位置(即該點(diǎn)在數(shù)組2中的索引值),IB2為查找到的B路信號(hào)第2個(gè)過(guò)零點(diǎn)在數(shù)組中2中所對(duì)應(yīng)的位置(即該點(diǎn)在數(shù)組2中的索引值)。
因?yàn)橘|(zhì)量流量計(jì)的主動(dòng)輪和質(zhì)量感受輪一周分別安裝了8個(gè)磁鐵,所以信號(hào)的一個(gè)脈沖(一個(gè)周期)只相當(dāng)于輪子轉(zhuǎn)動(dòng)了八分之一周,即實(shí)際的相位差只為求出的相位差Δθ的八分之一。質(zhì)量流量計(jì)實(shí)際產(chǎn)生的相位差為:Δφ=Δθ/8。
4誤差分析
4.1由傳感器本身帶來(lái)的誤差
質(zhì)量流量計(jì)的主動(dòng)輪和質(zhì)量感受輪一周分別安裝了8個(gè)磁鐵,由于存在磁鐵安裝不均勻,磁鐵不是在同一圓周上和輪子旋轉(zhuǎn)時(shí)的偏心等,由此帶來(lái)的誤差是按一定規(guī)律變化的。對(duì)于此種誤差,可以通過(guò)對(duì)每8(或者8的整數(shù)倍)個(gè)相位差求平均加以消除。
式中:k為正整數(shù),k的取值根據(jù)實(shí)際情況確定。傳感器安裝時(shí),由于前后磁鐵沒(méi)有對(duì)齊而造成的初始相位差,可以通過(guò)把求得的相位差減去初始相位差得到流量計(jì)實(shí)際的相位差。
4.2由硬件設(shè)備帶來(lái)的誤差[8]
數(shù)字過(guò)零法的誤差還與數(shù)據(jù)采集卡的位數(shù)、信號(hào)的采樣頻率以及信號(hào)的干擾因素等有關(guān)[4-5]。一般來(lái)說(shuō)數(shù)據(jù)采集卡的位數(shù)越大,所測(cè)量的相位差越精確;數(shù)據(jù)采集卡的采樣頻率越高,所測(cè)量的相位差越精確。因此應(yīng)在一定的條件下,盡量選用位數(shù)大,采樣頻率高的采集卡。另外,由于信號(hào)受到干擾也會(huì)影響測(cè)量精度,常出現(xiàn)無(wú)法消除的粗大誤差,因此,在進(jìn)行相位差測(cè)量之前還應(yīng)該對(duì)信號(hào)進(jìn)行數(shù)字濾波。因?yàn)閷?duì)相位信息有要求,所以選用FIR濾波器,因?yàn)镕IR濾波器的相頻響應(yīng)是線性的,可以防止時(shí)域數(shù)據(jù)發(fā)生畸變[9]。
5實(shí)驗(yàn)結(jié)果
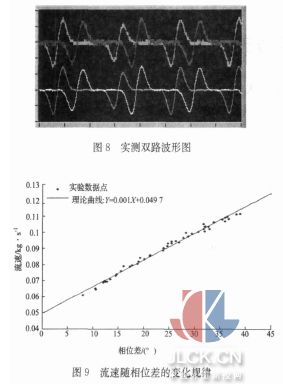
利用此方法對(duì)研制的質(zhì)量流量計(jì)進(jìn)行實(shí)際測(cè)量時(shí),從示波器觀察各個(gè)階段的波形,如圖8所示,圖中上半部分為沒(méi)有濾波之前的信號(hào),下半部分為經(jīng)過(guò)FIR濾波器濾波后的信號(hào),可以看出利用FIR濾波器能很好的調(diào)理信號(hào),濾除干擾信號(hào)。
實(shí)驗(yàn)數(shù)據(jù)如圖9所示,分析可得:流速隨相位差的變化近似為一條直線,滿足理論分析;實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)具有很好的線性性能。相位差測(cè)量誤差也滿足測(cè)量要求,傳感器測(cè)得的質(zhì)量流量精度達(dá)到1%。
6結(jié)論
本文從基于虛擬儀器的相位差測(cè)量方法入手,針對(duì)工程中的實(shí)際信號(hào),結(jié)合傳統(tǒng)的過(guò)零法,提出了一種設(shè)定閾值的改進(jìn)型過(guò)零法,該方法能很好的測(cè)量實(shí)際工程中頻率變化信號(hào)的相位差,達(dá)到需要的精度要求。但是,如果要獲得更高的精度,在以后的測(cè)量中應(yīng)選用位數(shù)更高的數(shù)據(jù)采集卡。綜上所述,本文提出的基于虛擬儀器的改進(jìn)型過(guò)零法,簡(jiǎn)單易行,效果顯著,成本低廉,在實(shí)際工程測(cè)量中有很高的實(shí)用價(jià)值。
摘自:中國(guó)計(jì)量測(cè)控網(wǎng)






