首頁>技術(shù)中心>技術(shù)資訊>基于藍(lán)牙的無線通信技術(shù)及其在機(jī)器人中的應(yīng)用
基于藍(lán)牙的無線通信技術(shù)及其在機(jī)器人中的應(yīng)用
發(fā)布時(shí)間:2017-09-01
1 引言
隨著計(jì)算機(jī)技術(shù)、網(wǎng)絡(luò)技術(shù)、信息技術(shù)的飛速發(fā)展, 人們需要交換的信息也越來越多樣, 需要交換信息的場(chǎng)合也越來越復(fù)雜, 這時(shí), 有線傳輸已經(jīng)不能滿足人們的需求, 無線技術(shù)也開始扮演著越來越重要的角色。“藍(lán)牙”技術(shù)是一種短距離無線寬帶通信技術(shù),是當(dāng)今世界公認(rèn)的十大科技成果之一。它具備一般無線通信的優(yōu)點(diǎn)也有其自身的特點(diǎn), 例如功耗小、傳輸穩(wěn)定、可靠、安全, 并且可以集成在任何需要無線傳輸?shù)漠a(chǎn)品中。
機(jī)器人一直是各國(guó)競(jìng)相研究、集成最新科技成果的高技術(shù)象征。從一定意義上講, 機(jī)器人水平的高低集中體現(xiàn)了這個(gè)國(guó)家的綜合科技實(shí)力。人們已經(jīng)不再僅僅希望讓機(jī)器人來完成人不想干的體力勞動(dòng)是早期開展機(jī)器人研究的根本動(dòng)力, 而是希望讓機(jī)器人實(shí)現(xiàn)人類的智能擴(kuò)展, 從事人類想干的腦力勞動(dòng)或輔助人的智能活動(dòng)。迄今為止, 機(jī)器人已經(jīng)在醫(yī)療、服務(wù)、娛樂、生物、醫(yī)藥、環(huán)保、軍事、核工業(yè)、水下、空間、農(nóng)業(yè)、工業(yè)、建筑、救災(zāi)和排險(xiǎn)等許多領(lǐng)域都開辟了前所未有的應(yīng)用空間。開放性、小型化、高柔性和高智能已成為機(jī)器人發(fā)展的主流方向, 而體現(xiàn)上述特點(diǎn)的人機(jī)交互和信息傳輸一直是制約機(jī)器人發(fā)展的重要因素之一。藍(lán)牙技術(shù)的出現(xiàn), 無疑為機(jī)器人發(fā)展開辟了一條嶄新的通道。
本文介紹了基于藍(lán)牙的無線通信系統(tǒng)的軟硬件設(shè)計(jì)及其在模塊化機(jī)器人中的應(yīng)用研究。
2 藍(lán)牙無線通信技術(shù)簡(jiǎn)介
藍(lán)牙技術(shù)開發(fā)的初衷是取消各種移動(dòng)設(shè)備之間的電纜, 但隨著技術(shù)的發(fā)展和深入, 它已經(jīng)成為當(dāng)今世界公認(rèn)的十大科技成果之一, 其應(yīng)用已經(jīng)擴(kuò)展到信息家電、計(jì)算機(jī)、交通、醫(yī)療、工業(yè)控制、機(jī)器人等更廣泛的領(lǐng)域。藍(lán)牙技術(shù)規(guī)范用來描述和規(guī)定各種信息電子產(chǎn)品( 包括通信產(chǎn)品、計(jì)算機(jī)產(chǎn)品和消費(fèi)產(chǎn)品) 相互之間是如何用短距離無線電系統(tǒng)進(jìn)行連接的, 具有低成本、微功率、短距離、小型化等優(yōu)點(diǎn)。藍(lán)牙采用2.4GHz ISM頻段和調(diào)頻、調(diào)頻技術(shù), 使用權(quán)向糾錯(cuò)編碼、ARQ、TDD 和基帶協(xié)議。由于藍(lán)牙采用無線接口來代替有線電纜連接, 具有很強(qiáng)的移植性, 并且適用于多種場(chǎng)合, 加上該技術(shù)功耗低、對(duì)人體危害小, 而且應(yīng)用簡(jiǎn)單、容易實(shí)現(xiàn), 所以易于推廣。藍(lán)牙最吸引人的特性是它的跳頻擴(kuò)頻 (Frequency Hop-ping Spread Spectrum, FHSS)特性。
在無線電射頻通信中, 擴(kuò)頻技術(shù)可以按照頻率、時(shí)間、編碼方式或其他的方法劃分可用的頻段需要傳送的信息被分成幾個(gè)部分, 在不同的頻率上傳輸。藍(lán)牙使用跳頻技術(shù), 這項(xiàng)技術(shù)將整個(gè)頻段劃分成不同的頻點(diǎn)或稱為信道。一個(gè)單獨(dú)的消息分組在一個(gè)選定的信道上傳送, 然后再跳到一個(gè)新的信道傳送下一個(gè)分組, 重復(fù)這個(gè)過程, 這樣就可以將消息擴(kuò)展到整個(gè)可用的頻段上。每一次跳變都與其建立的頻率跳變式樣相對(duì)應(yīng)。這個(gè)信息的接收機(jī)必須了解跳頻式樣, 才能調(diào)諧到正確的信道上, 連續(xù)地接收每個(gè)分組并組裝成一條完整的信息。
與簡(jiǎn)單的靜態(tài)選擇頻率相比, FHSS 更加復(fù)雜, 但它的優(yōu)點(diǎn)是明顯的。第一, FHSS 能夠提供一定級(jí)別的通信保密性, 以便只有知道跳頻式樣的接收器才能夠接收并組裝所有的消息分組。第二, 也是更重要的一點(diǎn), 由于無線電波從一個(gè)頻率到另一個(gè)頻率的跳變( 通常是隨機(jī)的, 至少是偽隨機(jī)的, 速度很快), 減少了射頻干擾。高穩(wěn)定性與抗干擾性對(duì)環(huán)境十分惡劣干擾很強(qiáng)的工作現(xiàn)場(chǎng)的在線測(cè)量工作十分必要。
3 藍(lán)牙的無線通信系統(tǒng)的軟硬件設(shè)計(jì)
3.1 硬件設(shè)計(jì)
藍(lán)牙內(nèi)嵌模塊我們采用了CSR 公司的BC01 芯片, 它集無線設(shè)備、處理器及基帶電路于一體, 采用標(biāo)準(zhǔn)的0.35μm 的CMOS 工藝。通過外置的存有藍(lán)牙協(xié)議的Flash ROM, 可提供完全兼容的數(shù)據(jù)和語音通信。經(jīng)過優(yōu)化設(shè)計(jì), 所需的外部 RF 元件很少, 允許主板的快速設(shè)計(jì), 因此能以最低的成本, 實(shí)現(xiàn)最短的產(chǎn)品面市時(shí)間。
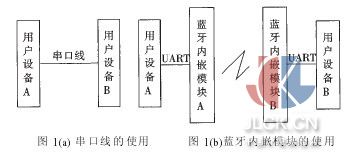
藍(lán)牙內(nèi)嵌模塊的主要工作是把從串口接收的數(shù)據(jù)轉(zhuǎn)換成符合藍(lán)牙協(xié)議的數(shù)據(jù), 然后發(fā)送到對(duì)方的藍(lán)牙設(shè)備, 并將從對(duì)方藍(lán)牙設(shè)備接收的藍(lán)牙數(shù)據(jù)包轉(zhuǎn)換成串口數(shù)據(jù)發(fā)送給設(shè)備。在使用藍(lán)牙內(nèi)嵌模塊之前可以通過串口線連接到計(jì)算機(jī)上對(duì)其進(jìn)行參數(shù)設(shè)置, 包括設(shè)置其波特率、主動(dòng)或被動(dòng)尋找匹配設(shè)備、是否加密及其加密密碼、是否綁定地址及其被綁定的藍(lán)牙地址等等。在使用時(shí)將藍(lán)牙模塊連接正確的電路, 并且加電啟動(dòng)后, 會(huì)自動(dòng)尋找匹配設(shè)備并建立連接。建立連接之后, 用戶就可以像使用一條串口線一樣的使用藍(lán)牙內(nèi)嵌式模塊, 串口線的使用和藍(lán)牙內(nèi)嵌模塊的使用比較如圖1 所示。
藍(lán)牙內(nèi)嵌模塊的外圍電路如圖 2, 其中 TXD 和RXD(5, 6 腳)兩個(gè)引腳分別是串行數(shù)據(jù)輸出和串行數(shù)據(jù)輸入的通道, 藍(lán)牙內(nèi)嵌模塊的 RTS 和 CTS(4, 3 腳)兩個(gè)引腳分別是請(qǐng)求發(fā)送和清除發(fā)送引腳, 由于不需要流量控制, 所以我們用1k 的電阻把 RTS 和 CTS 連接起來形成自握手。SLEEP(15 腳) 引腳是睡眠引腳,假設(shè)給睡眠引腳置低電平的時(shí)間為t, 則當(dāng)10ms≤t<2s 時(shí), 內(nèi)嵌模塊睡眠/喚醒。當(dāng) t>2s 時(shí), 內(nèi)嵌模塊清除記憶的地址。CTRLSLEEP 端被連接到單片機(jī)的一個(gè)I/O 引腳上, 由這個(gè)引腳的高低電平控制三極管的導(dǎo)通與截止, 這樣就可以自由地控制藍(lán)牙內(nèi)嵌模塊的SLEEP 引腳的電平高低, 從而完成藍(lán)牙模塊睡眠/喚醒或者清除藍(lán)牙模塊的記憶地址的功能。藍(lán)牙模塊的工作電壓是3V。
對(duì)藍(lán)牙內(nèi)嵌模塊的控制和串行數(shù)據(jù)的收發(fā)操作可由計(jì)算機(jī)或單片機(jī)來完成, 單片機(jī)可選用AT89C2051, 它有15 條可編程 I/O 線, 收發(fā)串行接口可以滿足控制和串行收發(fā)數(shù)據(jù)的需要。單片機(jī)其中一個(gè)I/O 引腳接在圖2 的 CTRLSLEEP 端, 由這個(gè)引腳的高低電平來控制藍(lán)牙內(nèi)嵌模塊的休眠與喚醒。藍(lán)牙內(nèi)嵌模塊的TXD 和RXD 引腳(5, 6 引腳) 可以直接與單片機(jī)或計(jì)算機(jī)的串行接口連接, 不需要進(jìn)行電平轉(zhuǎn)換。
3.2 軟件設(shè)計(jì)
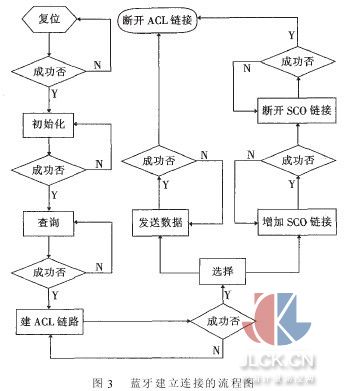
其軟件主要包括建立連接和數(shù)據(jù)信息的發(fā)送和接收。藍(lán)牙主機(jī)與藍(lán)牙模塊之間是通過各種 HCI 分組來交互的, HCI 分組包括三種, 分別是 HCI 指令分組、HCI 事件分組、HCI 數(shù)據(jù)分組。各種分組按 Big Edian(即高位字節(jié)先于低位字節(jié))進(jìn)行傳輸。藍(lán)牙建立連接的流程圖如圖3 所示。其中所需的指令如下:
復(fù)位: Reset [01 03 0C 00]
初始化: Write_Scan_Enable [01 1A 0C 01 03]
Set_Event_Filter [01 05 0C 03 02 00 02]
Ericsson_Write_PCM_Setting [01 07 FC 01 03]
查詢: Inquiry [01 01 04 05 33 8B 9E 06 00]
建立ACL: Create_Connection [01 05 04 0D
BD_ADDR 08 00 01 00 timedrift 00], 其中 BD_ADDR和timedrift 是由 Inquiry 得到的藍(lán)牙地址和時(shí)鐘偏差。
發(fā)送數(shù)據(jù): 02 01 20 02 00 FF FF(例子)
4 在機(jī)器人中的應(yīng)用
本課題研制了高性能的智能化模塊。這種模塊機(jī)械結(jié)構(gòu)緊湊、裝拆性能好且能互換, 含有豐富的低層控制庫(kù)函數(shù)來實(shí)現(xiàn)運(yùn)動(dòng)控制。它支持網(wǎng)絡(luò)化控制, 通信速率高, 含有傳感信息處理控制系統(tǒng), 具有多模塊同步協(xié)調(diào)功能, 使由多模塊組成的系統(tǒng)在軌跡跟蹤中能準(zhǔn)確到達(dá)每一插補(bǔ)點(diǎn), 形成有別于它家產(chǎn)品的獨(dú)特優(yōu)點(diǎn), 特別適用于要求高精度位置跟蹤的應(yīng)用場(chǎng)合。可重構(gòu)模塊化機(jī)器人由一系列標(biāo)準(zhǔn)化的基本部件所組成, 利用這些標(biāo)準(zhǔn)化部件的組合, 我們可以快速的組裝滿足不同任務(wù)需要、具有各種構(gòu)形和自由度的模塊化機(jī)器人。
我們將基于藍(lán)牙的無線通信技術(shù)應(yīng)用到可重構(gòu)模塊化機(jī)器人中, 該機(jī)器人由兩部分組成, 一部分是以PC 為核心的上位機(jī), 另一部分是以 pic 單片機(jī)為控制芯片的數(shù)字伺服控制系統(tǒng)。上位機(jī)和伺服控制系統(tǒng)通過藍(lán)牙模塊連接。PC 機(jī)通過藍(lán)牙模塊向機(jī)器人發(fā)送位置、速度、加速度等控制命令, 機(jī)器人通過藍(lán)牙模塊將自己當(dāng)前的狀態(tài)信息反饋給PC 機(jī)。實(shí)際證明控制效果良好。
5 結(jié)論
本文作者的創(chuàng)新點(diǎn)是在機(jī)器人控制中用藍(lán)牙技術(shù)代替了傳統(tǒng)的有線傳輸和一般的無線傳輸, 與有線控制相比, 它大大簡(jiǎn)化了信號(hào)傳輸?shù)牟季€, 使機(jī)器人控制更加靈活和方便, 與一般的無線傳輸相比, 藍(lán)牙技術(shù)的協(xié)議保證了更加可靠的數(shù)據(jù)傳輸。基于藍(lán)牙技術(shù)的無線通信模塊簡(jiǎn)化了機(jī)器人研究工作中無線通信的開發(fā)過程, 研究人員可以在掌握簡(jiǎn)單的數(shù)據(jù)幀格式的基礎(chǔ)上, 自行編寫數(shù)據(jù)包模塊, 使得藍(lán)牙模塊成為一個(gè)透明的數(shù)據(jù)傳輸通道, 就可以方便地通過串口直接與機(jī)器人實(shí)現(xiàn)雙向的數(shù)據(jù)收發(fā)。隨著人們對(duì)藍(lán)牙技術(shù)的進(jìn)一步了解, 相信在機(jī)器人研究領(lǐng)域會(huì)有越來越多的人應(yīng)用到這一項(xiàng)技術(shù)。本課題證明系統(tǒng)運(yùn)行效果良好, 具有進(jìn)一步推廣的價(jià)值。
摘自:中國(guó)計(jì)量測(cè)控網(wǎng)






