首頁>技術中心>技術資訊>數字智能超聲波探傷儀的定位、K值測定原理及在模擬儀上的一點應用
數字智能超聲波探傷儀的定位、K值測定原理及在模擬儀上的一點應用
發(fā)布時間:2017-09-01
1前言
數字智能超聲波探傷儀基于模擬儀的工作原理上,增加了模擬信號采集模塊、(定位、定量)計算模塊、數據儲存模塊、通訊顯示模塊,實現了數字時代的“人機對話”功能。
所有模塊中,計算模塊為核心單元。在各模塊單元的協(xié)調作用下,它能對采集到的模擬信號作出迅速的位置計算、量化、邏輯比較,有的儀器還能自動地深度補償。
正如計算機的死機一樣,如果計算模塊“死機”,探傷儀屏幕上的定位、定量、比較數據將不再隨所采集模擬信號的跳動而變化,而是處于不變的狀態(tài)。在此情況下,探傷儀就失去了“數字化、智能化”的內涵,實則為一純粹的模擬儀。
2縱波直探頭法的定位原理
那么數字智能儀是如何實現精確定位的呢?下面從儀器的校準談起。
數字儀、模擬儀的橫坐標軸均為時間軸,所不同的是,數字儀表示任一距離聲波傳輸的絕對時間;模擬儀大多表示各距離聲波傳輸的相對時間。探傷前對儀器、探頭系統(tǒng)校準的目的之一就是向計算模塊提供定位參數。以縱波直探頭法校準為例:
由公式S=c(t-t0) (1)
得t0=t-S/c(2)
式中S―反射體至探頭入射點的距離(mm)
c―介質的聲速(mm/s)
t―聲波從發(fā)射至接受所經歷的時間(s)
t0―聲波在探頭楔塊中傳播的時間(s)
上兩式表明,在同一介質、儀器、探頭系統(tǒng)中任一距離反射體都唯一對應一組(S,t),不變的是t0。獲取t0就是各數字儀校準的實質目的。
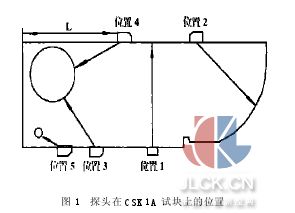
校準時,先設定校準反射體位置S’、聲速C;然后數字儀提示您將探頭置于設定的探測面上,如L=100mm(圖1中位置1),此時儀器“自動”提供了一個閘門,而閘門內的反射波就是校準反射體的回波,儀器還提示你,當閘門內的回波幅值最大時按“確認”鍵。按“確認”鍵的目的是讓其它模塊測定該波從發(fā)射至接收所經歷的時間t。然后計算模塊根據公式(2)和其它已知的參數計算得出t0值。
當計算模塊完成時對t0的運算,儀器校準完畢進入工作狀態(tài)后,計算模塊按公式(1)來承擔運算任務,此時只有一個變量t0調節(jié)閘門位置與寬度,將閘門套住你感興趣的缺陷回波,計算模塊“自動”被輸入該回波的傳輸時間t,并計算出相應的距離S。
3橫波探傷K值測定、定位原理
橫波探傷K值測定原理與上所述雷同,主要分3步驟:
①入射點校測;
②判斷K值范圍;
③K值校測;
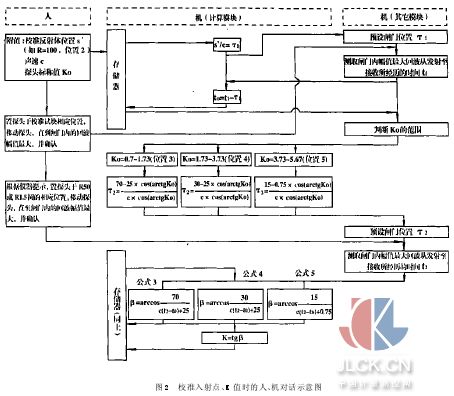
詳細說明見圖2。
4在模擬儀上的應用
傳統(tǒng)的K值測定公式(以位置4為例)為: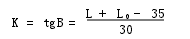
式中L(如圖1所示)和L0(前沿)均靠直尺測量得出,測量時難以避免產生誤差及誤差傳遞。仔細研究圖2中的公式(3)、(4)、(5)發(fā)現其中有一公共因子c(t2-t0),該因子的含義為聲波從入射點到反射體所傳輸的聲程。先對模擬儀水平軸以聲程1∶1調節(jié):根據探頭K值范圍,將探頭置于相應的位置;移動探頭,找到最大反射回波;讀取的屏幕水平刻度值即為該聲程值;代入公式(3)、(4)、(5),直接計算出K值。這種K值測定方法避免了先用直尺測量前沿L0,再測量L所帶來的測量誤差及誤差傳遞。
摘自:中國計量測控網






