智能控制算法在雜交儀開發中的應用
發布時間:2017-09-01
引 言
現代生物技術、信息技術、新材料和新能源技術并列成為影響國計民生的四大科學技術支柱,是21 世紀高新技術產業的先導。生物工程的基礎是生物試驗。雜交潤洗過程是很多生物實驗都有的共同步驟,其過程往往比較煩瑣費力,而且耗時比較長,有的實驗甚至長達幾十個小時;而且該實驗溫度控制比較困難,實驗的每一步驟液體種類和體積都不一樣,升溫過程和降溫過程的曲線也完全不同。面對這樣的控制對象,普通 PID 算法難以達到實驗要求的精度。
某智能雜交實驗儀基本的機械結構如圖 1 所示。實驗結果表明,控制對象并不是一個簡單的線性對象,而是一個帶延遲環節、階段連續的時變二階對象。
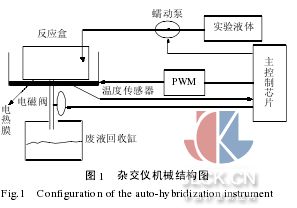
蠕動泵負責各種實驗液體的輸送;電磁閥控制排液,某步驟實驗結束時廢液排入廢液回收缸;電熱膜用于加熱反應盒,保持實驗液體一定范圍內的溫度;利用溫度傳感器 AD590 進行測溫,信號輸入到主控制芯片進行 A/D 轉換;溫度控制方式采用脈寬調制方式(PWM)。
1 溫度控制算法研究
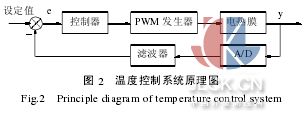
在雜交實驗過程中,反應溫度必須嚴格控制在設定溫度的±0.5℃之間,這樣實驗結果的可信度才比較高。而雜交實驗的溫度控制系統是一個隨動控制系統(設定值是變化的)和自動調節系統(被控量在設定值附近變化)的綜合,如何在這樣的復合控制系統中保證溫度的控制精度是必須研究的。在工業過程控制中,往往是等被控量進入了某一范圍之后才能投上 PID 控制,而且 PID 的初值選取也是一個不容易解決的問題。這就要求研究一些新的控制算法來確定 PID 初值,及如何讓被控量盡快地進入 PID 的調節范圍并防止超調。溫度控制原理如圖 2 所示。通過不停地調整 PWM 的占空比來改變電熱膜的通電時間,達到控溫的目的。
1.1 預補償 PID 控制算法
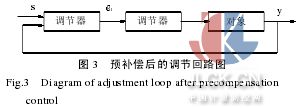
PID 調節是通過對其輸入被控量的偏差進行比例、積分、微分運算而得到控制輸出量的。對大慣性對象來說,當被控量偏差剛剛出現時,偏差值很小,但擾動已作用多時。此時常規 PID 調節器往往不能及時調節,造成調節品質下降。根據被控量的大小和其變化速率、方向以及時間關系,將調節器輸入的被控量的偏差先行進行預補償運算,得到新的偏差值后,再經過常規 PID 運算獲得新的控制方法。這種預補償運算關系可根據被控對象特性和控制要求來確定。圖 3 給出了預補償后的調節回路圖。
預補償環節的偏差1與被控量的偏差 e 之間關系如圖 4 所示。用函數表示為1=f (e)。圖中虛線為1=e 線。當偏差值 e 為正且向增大方向變化時,1沿曲線 oiA 進行預補償;當偏差值為正且向減小方向變化時,1沿曲線 Ado 進行預補償;當偏差值為負且向增大 (絕對值) 方向變化時,1沿曲線 omB 進行補償;當偏差值為負且向減小 (絕對值) 方向變化時,1沿曲線 Bno 進行補償;當偏差值不變化時,e=1。
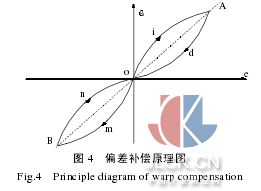
基于上面原理,令 = 1 ,可采用如下的補償方法:1= + 。上式算法簡單,易于在單片機上實現。在輸出y 偏離設定值時, >0,補償后||>| |;輸出 y正在跟蹤設定值時, <0,補償后|1|<| |;輸出值不變化時, =0,補償環節不進行補償,|1|=| |。
圖 5給出了采用預補償PID控制算法的實驗過程中,某步驟多次循環中的 4 次循環溫度響應曲線。
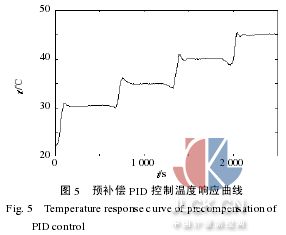
由圖 5 可以看出,采用預補償 PID 算法獲得了較好動態性能,超調基本上控制在 1℃左右,調節時間控制在 90 s 左右;靜態偏差控制在±0.2℃以內,能夠很快地跟蹤設定值。在一個實驗步驟結束后,系統要進行換液排液,PWM 停止輸出,所以出現溫度下降的趨勢。雖然實驗的對象已經發生了變化,但是其動態性能并沒有出現大的波動,呈現出了較強的魯棒性,所以非常適合于控制分階段連續時變對象。但其初值的選擇較難確定,只能靠經驗。
1.2 模糊控制算法
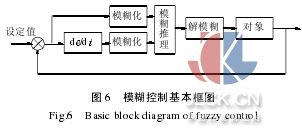
與傳統控制理論相比,模糊控制有兩大不可比擬的優點:模糊控制在許多應用中可以有效且便捷地實現人的控制策略和經驗;模糊控制可以不需被控對象的數學模型即可實現較好的控制,因為被控對象的動態特性已隱含在模糊控制器輸入、輸出模糊集及模糊規則中。模糊控制算法實際上是一種基于規則推理的計算機控制算法,具有數字控制系統的一般結構,通過偏差和偏差的變化率來對對象進行控制,其常用組成如圖 6 所示。
1.2.1 模糊控制算法的實現
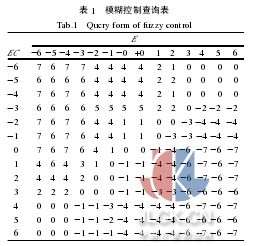
模糊控制算法有多種實現形式。在單片機實現的模糊控制系統中,常采用查表法,即事先制造模糊控制響應表,在軟件設計時將該表格事先置入內存中供實時查表使用。在實際控制時,模糊控制器首先把輸入量量化到輸入量的語言變量論域中,再根據量化的結果去查表求出控制量,這樣可大大提高模糊控制的實時效果,節省內存空間。這種方法的特點是首先求出模糊關系 R,再根據輸入的偏差和偏差變化率利用合成推理方法求出模糊輸出量,最后經過反模糊化可把模糊量轉化為精確量,即可得到控制量。
在實際應用中,對各種 E 和 EC 的組合情況進行離線計算得到相應的控制量,從而得出如表 1 的模糊控制查詢表。
1.2.2 模糊控制效果分析
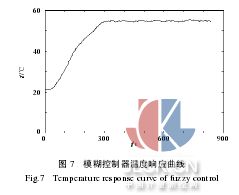
把上述的模糊控制查詢表 1 存入 C8051F005芯片的 FLASH 存儲器中,實驗的對象是 45 mL 的液體,加熱對象是封閉式盒子,溫度測點選在實驗液體上方。使用該模糊控制器所得到的溫度響應曲線如圖 7 所示。由圖可知,模糊控制器的響應時間是比較快的,但它并不能消除穩態偏差,在上述條件下其穩態偏差大約為 0.45℃,而且存在一定程度的波動,其精度和魯棒性均不如預補償 PID 控制算法。因此只用模糊控制算法還達不到實驗所要求的控制精度。
2 智能控制算法
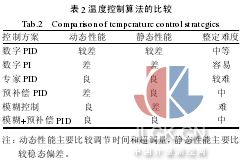
在對生物雜交實驗的液體溫度控制中,各種控制方案優缺點比較如表 2 所示。
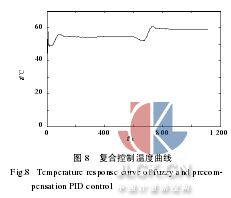
為了能充分利用模糊控制和預補償 PID 控制方法的優點,可以在大范圍內選用模糊控制,提高系統的響應速度和魯棒性,而溫度接近設定值時選用預補償 PID 控制方案,提高了系統的靜態性能。這種復合控制的溫度響應曲線如圖 8 所示,是實驗過程中某兩步切換時的溫度響應曲線。從圖 8 可以看出,溫度響應速度較快,超調量較小,對象發生改變時系統能很快地到達新的平衡,靜差控制在 0.15℃以內,幾乎沒有振蕩,因此這種控制方案非常適合于雜交實驗過程中的帶遲延、階段連續的復雜時變對象的控制。
這種復合控制方法的整定并不復雜:由于模糊控制只負責大范圍的控制,所以其論域沒有必要選得太多,一般分成 3 檔即可,可以解決預補償 PID的初值問題;預補償 PID 只選用 PI 算法即可,不僅能達到所要求的精度,更使得控制參數易于整定。
綜合比較各控制方案的動態性能、靜態性能、整定難度,并經過試驗證實,本文選取的大范圍內采用模糊控制,小范圍內采用預補償 PID 控制的復合控制方案效果良好,達到了實驗溫度控制精度的要求,參數整定也比較容易。
3 結 論
雜交實驗是一個復雜的緩慢反應過程,各步驟間液體的種類和設定溫度都有可能變化,如何精確地控制實驗液體溫度是自動雜交儀開發的難點。本文針對這種狀況,在研究溫度的精確控制過程中,提出了一種大范圍內采用模糊控制,小范圍內采用預補償 PID 控制的新型復合控制算法。實驗結果表明,該算法對這類階段連續、有遲延的時變控制對象是非常有效的。由于模糊控制只負責大范圍內調節,所以其論域分檔可以選得少一些,使得系統整定更方便。該復合算法程序簡單,很容易在單片機上實現,具有一定的推廣價值。
摘自:中國計量測控網






