首頁>技術(shù)中心>技術(shù)資訊>基于CCD 的微縫寬激光測量系統(tǒng)的改進(jìn)
基于CCD 的微縫寬激光測量系統(tǒng)的改進(jìn)
發(fā)布時間:2017-09-01
引言
傳統(tǒng)的微縫寬度是通過直接投影等方法實現(xiàn)的,但由于該方法不能適應(yīng)產(chǎn)品質(zhì)量和生產(chǎn)效率的要求,已趨于淘汰。取而代之出現(xiàn)了一種精度更高, 自動性更強(qiáng)的基于CCD 的非接觸式衍射法測量微縫寬度的理論, 但在實際應(yīng)用中由于測量距離的不確定性, 激光經(jīng)微縫衍射后產(chǎn)生的衍射圖樣微弱, 信號的信噪比很低, 衍射圖形的銳度不大, 光敏元響應(yīng)不均勻及雜散光的干擾等因素, 給精密測量帶來很多困難, 而且用單線陣CCD 對條紋間距的正交對準(zhǔn)有一定的困難, 用面陣CCD 又比較昂貴。基于上述問題, 下面是對該系統(tǒng)裝置的改進(jìn)及精度分析。
1 系統(tǒng)改進(jìn)原理
1.1 系統(tǒng)測量光學(xué)原理
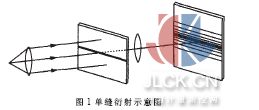
當(dāng)激光束通過被測微縫后, 形成單縫夫瑯和費(fèi)衍射,如圖1 所示。
根據(jù)夫瑯和費(fèi)衍射公式, 衍射圖樣上任意點(diǎn)P 的復(fù)振幅為:

式中z 是微縫邊緣與中心點(diǎn)之間的位相差, 該差值決定了衍射條紋光強(qiáng), 當(dāng)衍射圖樣為極值時, 其位相差應(yīng)該滿足z=atanθ=2mπ。這樣就得到半徑的計算公式:
式中ak 為衍射圖樣中第k 級衍射環(huán)的半徑; λ為激光波長; l 是衍射微縫至衍射圖樣的距離; m 是貝塞耳函數(shù)的零點(diǎn)值, 當(dāng)衍射環(huán)級數(shù)確定時, 該值為常數(shù)。為避免衍射距離對測量結(jié)果的影響, 上述公式還可寫成一個用增量形式表達(dá)的公式:
因此, 只要確定衍射距離改變量和同級衍射條紋距離的改變量即可求出微縫的寬度。
1.2 系統(tǒng)測量原理
整個測量系統(tǒng)是在導(dǎo)軌上進(jìn)行的, 線陣CCD1 與CCD2 分別位于分光棱鏡的兩個出射面上, 并且兩線陣CCD 互相垂直放置, 中心與主光軸重合, 組成正交線陣CCD。展開光路后兩個線陣CCD 即等價于兩個同面、正交的線陣CCD, 構(gòu)成于一個正交坐標(biāo)系。兩正交及兩分光鏡都固定在導(dǎo)軌上, 原理如圖2 所示。
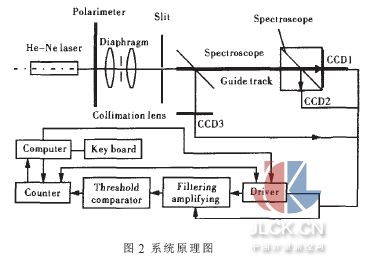
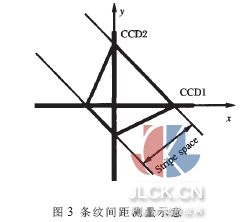
由He- Ne 激光器發(fā)出激光束, 經(jīng)偏振片進(jìn)入準(zhǔn)直透鏡組, 擴(kuò)束成平行測量光, 其中小孔光闌起空間濾波作用。準(zhǔn)直擴(kuò)束后光線經(jīng)被測微縫產(chǎn)生衍射, 衍射光束經(jīng)分光鏡分成兩束光分別成像在正交CCD 組及CCD3 上面, 其中一束分別和CCD1 與CCD2 相交, 即可從CCD1 和CCD2 得到衍射環(huán)與CCD 的四個交點(diǎn)坐標(biāo)( 如圖3 所示) , 所得數(shù)據(jù)經(jīng)計算機(jī)計算后可得出特定衍射條紋間距。而CCD3 用于測量任意衍射條紋位置。當(dāng)測量系統(tǒng)軸向移動到導(dǎo)軌另一位置后, 得到移動后新的特定條紋間距, 并計算出移動前后兩次間距差Δak , 而CCD3 測量的同級條紋與原位置的差值, 即為導(dǎo)軌移動距離Δl, 代入公式( 8) , 得到被測微縫寬。
2 系統(tǒng)精度提高分析
2.1 Δl 的確定
傳統(tǒng)的測量方法一般是根據(jù)公式( 7) 來完成的,由于公式中微縫到測量CCD 的距離l 對微縫寬測量精度的影響非常大, 而傳統(tǒng)方法往往由于微縫位置的不確定性, 使l 具有很大的不確定性, 給最后的微縫寬測量帶來較大誤差。系統(tǒng)改進(jìn)后采用公式( 8) 進(jìn)行測量, 通過測量系統(tǒng)在導(dǎo)軌上的移動, 再經(jīng)CCD3 對衍射條紋的測量得到l 的變化量Δl, 這樣測得的微縫寬的誤差與Δl 的誤差成正比。而根據(jù)系統(tǒng)結(jié)構(gòu), Δl的誤差非常小( CCD 像元級) , 而系統(tǒng)采用CCD 像元尺寸僅為0.007 mm, 使最終測量精度得到大幅提高。
2.2 改用正交線陣CCD 作為接收元件
傳統(tǒng)的測量方法是以單線陣CCD 或面陣CCD作為接收元件的, 這樣對CCD 的定位就非常嚴(yán)格, 即CCD 必須與條紋嚴(yán)格正交, 但由于縫寬位置的可變性, 做到這一點(diǎn)非常困難, 勢必給系統(tǒng)帶來誤差。而如果使用面陣CCD 作為接收元件又相當(dāng)昂貴, 因此系統(tǒng)改進(jìn)后用正交的線陣CCD 作為接收元件, 測量時CCD 無需嚴(yán)格正交, 衍射光束經(jīng)分光鏡分成兩束光其中一束分別與CCD1 和CCD2 相交, 即可得到衍射環(huán)與CCD 的四個交點(diǎn)坐標(biāo), 所得數(shù)據(jù)經(jīng)計算機(jī)處理后可得出特定衍射條紋間距, 操作簡便。
2.3 E 取向?qū)ξ⒖p寬度測量精度的影響
實驗和理論證實: 衍射法測縫寬存在著偏振效應(yīng)。采用偏振激光和非偏振激光會給微縫寬的高精度測量帶來不可忽略的誤差[3]。為了滿足遠(yuǎn)場夫瑯和費(fèi)衍射條件, 測量系統(tǒng)使偏振度降低。因此, 測量系統(tǒng)中的起偏振鏡組( 如圖2 所示) 提高了投射到被測微縫上的激光的偏振度, 并便于選擇恰當(dāng)E 取向, 用以消除因非線偏光或E 的不同取向所帶來的誤差。
2.4 其他因素影響
He- Ne 激光器的波長誤差主要取決于激光器的波長穩(wěn)定性, 即頻率的穩(wěn)定性。而目前He- Ne 激光器的頻率穩(wěn)定度可達(dá)2×10- 12 以上, 所以, 從理論上講, 波長可以達(dá)到0.01 nm, 誤差極小。
由于系統(tǒng)采用線陣CCD 接收并測出與衍射條紋交點(diǎn)坐標(biāo)值, 因此CCD 像元的大小會影響測量的精度。利用高靈敏度的線陣固態(tài)CCD 傳感器接收激光束衍射條紋來標(biāo)定交點(diǎn)坐標(biāo)值, 其像元尺寸為0.007mm, 光譜響應(yīng)范圍在0.4~1.2 μm 之間( 屬可見光及近紅外范圍) 具有2 048 個像元, 因此正交線陣CCD測量裝置是通過測量大尺寸的條紋來計算得到小尺寸的微縫縫寬, 因而這種影響是很小的。
3 系統(tǒng)實驗及結(jié)論
基于上述理論和實驗依據(jù)對測量系統(tǒng)改進(jìn), 使非接觸激光微縫寬測量裝置在10~120 μm 測量范圍內(nèi),測量誤差為0.1~0.5 μm。表1 是一組系統(tǒng)對標(biāo)稱值為60 μm 的漆包線的實測數(shù)據(jù)。
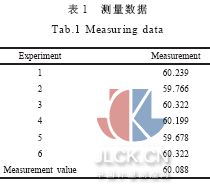
依據(jù)貝塞耳公式根據(jù)公式( 8) 可計算得到系統(tǒng)實驗的標(biāo)準(zhǔn)偏差:
系統(tǒng)性能穩(wěn)定, 測量過程實現(xiàn)了非接觸、高精度在線測量。
摘自:中國計量測控網(wǎng)






