首頁>技術(shù)中心>技術(shù)資訊>基于新型壓電驅(qū)動(dòng)器的激光掃描器
基于新型壓電驅(qū)動(dòng)器的激光掃描器
發(fā)布時(shí)間:2017-09-01
引言
激光掃描器,如多面轉(zhuǎn)鏡掃描器、振鏡掃描器(檢流計(jì)式)、音圈電機(jī)掃描器和壓電掃描器等,在激光加工、激光投影、激光電視、生物醫(yī)學(xué)、半導(dǎo)體工藝、激光雷達(dá)等領(lǐng)域中獲得了廣泛的應(yīng)用。多面轉(zhuǎn)鏡掃描器雖然具有掃描速度快、掃描角度大、回掃快和速度穩(wěn)定性高等優(yōu)點(diǎn),但也有半徑差引起的非線性誤差和各小面不平行度引起的塔形誤差,會(huì)影響掃描精度[1]。振鏡掃描器在高頻掃描(幾百赫茲以上)時(shí),掃描最大角度和線性度都會(huì)嚴(yán)重下降。另外,上述兩種掃描器都有轉(zhuǎn)動(dòng)慣量大、功耗大、有摩擦等缺點(diǎn),難以實(shí)現(xiàn)高速靈巧掃描,在空間領(lǐng)域應(yīng)用也受限。音圈電機(jī)掃描器[2]掃描角度較大,但是掃描頻率較低,功耗較大。
傳統(tǒng)的壓電光學(xué)掃描器[3]采用壓電陶瓷驅(qū)動(dòng)器直接驅(qū)動(dòng),多用于自適應(yīng)光學(xué)補(bǔ)償,掃描器頻率較高,但是由于壓電陶瓷驅(qū)動(dòng)位移量小, 導(dǎo)致掃描角度小,限制了在其他領(lǐng)域的應(yīng)用。為了彌補(bǔ)壓電陶瓷驅(qū)動(dòng)位移量小的缺點(diǎn), 國內(nèi)外研究者設(shè)計(jì)了多種位移放大結(jié)構(gòu),主要采用杠桿放大原理,在多種微位移驅(qū)動(dòng)機(jī)構(gòu)里得到了應(yīng)用。杠桿式的位移放大機(jī)構(gòu)放大率高,但是諧振頻率不高,影響其高頻動(dòng)態(tài)應(yīng)用。
在激光雷達(dá)等領(lǐng)域,通常希望激光光束以高頻率勻速掃描(即三角波掃描),而上述激光掃描器很難達(dá)到這種要求。為此,文中基于新型的彈性外殼式位移放大壓電驅(qū)動(dòng)結(jié)構(gòu)[4-7],設(shè)計(jì)了一種高性能的激光掃描器(以下簡稱掃描器),該驅(qū)動(dòng)結(jié)構(gòu)具有比杠桿式壓電驅(qū)動(dòng)結(jié)構(gòu)更好的高頻動(dòng)態(tài)特性,可以實(shí)現(xiàn)比傳統(tǒng)壓電掃描器大的掃描角度和較高的掃描頻率,通過軟件補(bǔ)償和串聯(lián)硬件陷波器相結(jié)合的開環(huán)控制方法,補(bǔ)償壓電陶瓷遲滯效應(yīng)影響和抑制機(jī)械諧振,提高了掃描線性度,實(shí)現(xiàn)了高頻勻速掃描。文中詳細(xì)介紹了新型位移放大壓電驅(qū)動(dòng)結(jié)構(gòu)和新型激光掃描器的工作原理,對(duì)其進(jìn)行了模擬分析,介紹了掃描器的驅(qū)動(dòng)控制方法,并對(duì)掃描器進(jìn)行了性能測(cè)試。
1 新型位移放大壓電驅(qū)動(dòng)器的工作原理
新型位移放大壓電驅(qū)動(dòng)器由壓電陶瓷疊堆和彈性外框組成, 彈性外框采用彈簧鋼60Si2Mn 制作,壓電陶瓷疊堆驅(qū)動(dòng)器在一定的預(yù)緊力作用下卡在彈性外框內(nèi),其結(jié)構(gòu)和工作原理如圖1 所示。當(dāng)給壓電陶瓷施加正電壓時(shí),壓電陶瓷會(huì)伸長,迫使彈性外框變形,在與壓電陶瓷伸長方向垂直的方向上縮短。因此,位移放大壓電驅(qū)動(dòng)器可將壓電陶瓷在橫向的伸長運(yùn)動(dòng)轉(zhuǎn)化為縱向的縮短運(yùn)動(dòng),縮短的位移量按照一定比例放大。將驅(qū)動(dòng)器近似為一個(gè)橢圓,位移放大率A 與驅(qū)動(dòng)器的長短軸之比近似成正比:A=a/b (1)
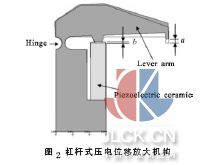
式中:a 為放大端的位移量;b 為壓電陶瓷的驅(qū)動(dòng)位移量。位移放大的驅(qū)動(dòng)器改善了普通壓電陶瓷驅(qū)動(dòng)器位移量很小的缺點(diǎn),將其位移量成倍地放大。傳統(tǒng)的杠桿式位移放大壓電驅(qū)動(dòng)結(jié)構(gòu)也可以將壓電陶瓷的位移進(jìn)行放大,其結(jié)構(gòu)如圖2 所示,其位移放大率同樣如公式(1)所示。
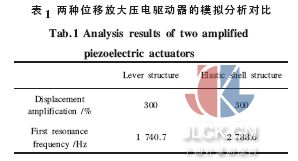
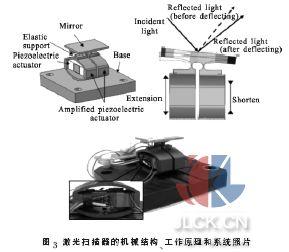
為了比較兩種放大結(jié)構(gòu)的動(dòng)態(tài)性能,分別設(shè)計(jì)了兩種類型的放大結(jié)構(gòu), 外框材料都采用60Si2Mn,壓電陶瓷尺寸都為5 mm×5 mm×18 mm,其位移放大率相同,用有限元分析軟件ANSYS 分析了其位移放大率和模態(tài)頻率,結(jié)果如表1 所示,可以發(fā)現(xiàn):采用彈性外框的位移放大器的一階固有頻率比杠桿式位移放大器高很多,因此,更適合做高頻驅(qū)動(dòng)。對(duì)圖3 所示掃描器中的驅(qū)動(dòng)器實(shí)物進(jìn)行無負(fù)載輸出位移量測(cè)試,在100 VDC 電壓下,輸出位移量為40 μm,為壓電陶瓷位移量15 μm 的2.7 倍, 稍小于設(shè)計(jì)的3 倍放大率,主要原因是部分電壓用于克服壓電陶瓷兩端的壓力。
2 激光掃描器的工作原理
掃描器采用一對(duì)位移放大的壓電驅(qū)動(dòng)器作為驅(qū)動(dòng)器件,驅(qū)動(dòng)器底部固定于底座上,彈性鉸鏈鏡架通過兩個(gè)彈性鉸鏈連接于兩個(gè)驅(qū)動(dòng)器上方, 鏡架上粘有反射鏡片。在平衡狀態(tài)時(shí)(即掃描零位),兩個(gè)驅(qū)動(dòng)器分別加載相同的電壓。當(dāng)兩個(gè)驅(qū)動(dòng)器的加載電壓分別增大和減小時(shí), 驅(qū)動(dòng)器就會(huì)分別做縮短和伸長運(yùn)動(dòng)( 相對(duì)于平衡狀態(tài)),可帶動(dòng)連接于其上的彈性鉸鏈鏡架和反射鏡做偏轉(zhuǎn)擺動(dòng), 從而實(shí)現(xiàn)光束的偏轉(zhuǎn)掃描。掃描器的機(jī)械結(jié)構(gòu)、工作原理和系統(tǒng)實(shí)物照片如圖3 所示。
對(duì)掃描器結(jié)構(gòu)模型進(jìn)行適當(dāng)簡化,將位移放大壓電驅(qū)動(dòng)器和彈性鉸鏈視為彈簧,則掃描器機(jī)械結(jié)構(gòu)模型如圖4 所示。系統(tǒng)的角自振頻率為:

式中:K 為位移放大壓電驅(qū)動(dòng)器和彈性鉸鏈的等效彈性系數(shù);d 為鉸鏈中心距;D 為反射鏡口徑;m 為反射鏡和鏡架的質(zhì)量。
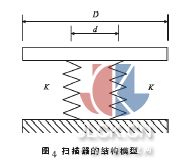
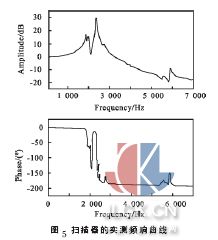
由公式(2)可以看出:增大鉸鏈中心距、增大壓電驅(qū)動(dòng)器和彈性鉸鏈的剛度可以增大角自振頻率,但這樣同時(shí)會(huì)減小最大掃描角度,因此,需要綜合考慮。使用ANSYS 有限元分析軟件對(duì)掃描器進(jìn)行了模態(tài)分析。分析得出:其前3 階固有頻率為1 950 Hz、2 092 Hz 和2 553 Hz。再用掃頻的方法測(cè)試得出掃描器的實(shí)際頻響曲線,如圖5 所示,前3 階諧振頻率為1 872 Hz、1 960 Hz、2 364 Hz, 可以看出: 掃描器的模態(tài)比較復(fù)雜,在3 dB 帶寬內(nèi)大約有4 個(gè)模態(tài),因此,要實(shí)現(xiàn)高頻勻速掃描,必須想辦法抑制機(jī)械諧振。
3 應(yīng)用
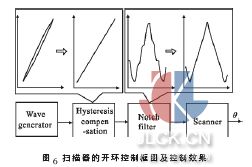
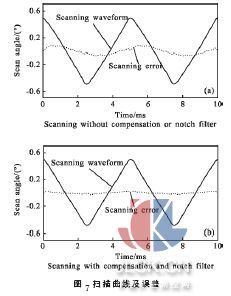
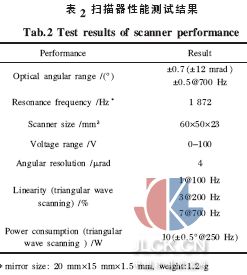
在激光雷達(dá)等應(yīng)用中,通常希望激光光束為勻速掃描,即三角波掃描。三角波形含有大量高次諧波分量,這些高頻成分會(huì)激發(fā)掃描器的諧振,嚴(yán)重影響掃描線性度。另外,壓電陶瓷固有的遲滯效應(yīng)也會(huì)明顯影響掃描線性度。采用軟件補(bǔ)償和串聯(lián)硬件陷波器[8]相結(jié)合的控制方法可以補(bǔ)償遲滯效應(yīng)和抑制諧振,有效提高掃描線性度,其開環(huán)控制框圖和作用效果如圖6 所示。先測(cè)試掃描器的低頻三角波掃描波形,得到其遲滯曲線, 然后根據(jù)遲滯曲線對(duì)驅(qū)動(dòng)波形進(jìn)行修正,使修正后的掃描波形達(dá)到線性掃描,可以對(duì)修正后的驅(qū)動(dòng)波形建立修正表,這樣就可以補(bǔ)償掃描器的遲滯效應(yīng)影響。根據(jù)掃描器的振動(dòng)模態(tài)和頻響曲線,并分析實(shí)際掃描波形的頻譜,發(fā)現(xiàn)對(duì)掃描線性度產(chǎn)生影響的主要為前三階諧振頻率,因此,在高壓放大器前串聯(lián)三級(jí)硬件陷波電路,其陷波中心頻率分別對(duì)應(yīng)掃描器前三階諧振頻率,實(shí)驗(yàn)證明:該方法可以有效抑制掃描器機(jī)械諧振,提高掃描線性度。由圖6 可以看出:補(bǔ)償遲滯效果和抑制諧振的效果很明顯。分別測(cè)試了不加補(bǔ)償和陷波器、加補(bǔ)償和陷波器兩種情況下的三角波掃描波形,掃描頻率為200 Hz,光學(xué)掃描角度為±0.5°,掃描曲線和誤差如圖7 所示。可以看出:采用補(bǔ)償和陷波器后,最大誤差從0.085°減小到了0.03°,掃描波形中間85%的區(qū)域線性度優(yōu)于1%。在基于位敏探測(cè)器(PSD ) 和Lab VIEW 的測(cè)試平臺(tái)上,對(duì)掃描器進(jìn)行了一系列性能測(cè)試,測(cè)試結(jié)果如表2 所示。可以看出:該掃描器具有轉(zhuǎn)動(dòng)慣量低、體積小、功耗低等優(yōu)點(diǎn)。
4 結(jié)論
文中的激光掃描器采用了新型的位移放大壓電驅(qū)動(dòng)結(jié)構(gòu),比傳統(tǒng)壓電掃描器掃描的角度大,新型的彈性外框式位移放大結(jié)構(gòu)具有比傳統(tǒng)杠桿式結(jié)構(gòu)更高的固有頻率,更適合高頻動(dòng)態(tài)應(yīng)用。掃描器采用軟件補(bǔ)償和串聯(lián)硬件陷波器相結(jié)合的開環(huán)控制方法,補(bǔ)償壓電陶瓷遲滯效應(yīng)影響和抑制機(jī)械諧振,提高了掃描線性度,實(shí)現(xiàn)了高速一維三角波光束掃描。該掃描器已用于激光雷達(dá)光束高速掃描。激光雷達(dá)掃描機(jī)構(gòu)由兩部分組成: 一個(gè)轉(zhuǎn)臺(tái)掃描反射鏡實(shí)現(xiàn)大視場(chǎng)掃描,文中的壓電掃描器實(shí)現(xiàn)高速亞視場(chǎng)掃描。該掃描器采用的壓電陶瓷器件的最大伸展次數(shù)在5×109 量級(jí),如果以200 Hz 掃描,可以連續(xù)工作約7 000 h。用閉環(huán)控制方法可以達(dá)到更好的掃描線性度和掃描控制精度,但是由于掃描器的模態(tài)比較復(fù)雜,要實(shí)現(xiàn)高頻率三角波掃描閉環(huán)控制難度很大,這將在以后的工作中繼續(xù)研究。
摘自:中國計(jì)量測(cè)控網(wǎng)






