首頁(yè)>技術(shù)中心>技術(shù)資訊>工件面形的精確測(cè)量仿真
工件面形的精確測(cè)量仿真
發(fā)布時(shí)間:2017-09-01
引 言
s對(duì)于納米級(jí)以下工件面形的高精度加工,面形精確測(cè)量非常重要;只有得到微小的面形偏差數(shù)據(jù),才能指導(dǎo)工件面形的進(jìn)一步加工。對(duì)于微小面形偏差,采用常規(guī)的方法難以實(shí)現(xiàn),對(duì)于表面具有一定反射率的工件,可以通過(guò)一定的能量衰減,從而借用光學(xué)元件的面形測(cè)量技術(shù)。
目前常用干涉儀對(duì)光學(xué)元件的面形進(jìn)行測(cè)量。在干涉波前恢復(fù)方式中,可以分為相移法、條紋跟追法和相位展開(kāi)方法。相移法是通過(guò)獲取同一方向上的一定相位差的多幅干涉圖來(lái)計(jì)算平面波通過(guò)相位物體的相位變化,條紋跟追方法是通過(guò)計(jì)算干涉圖中的干涉條紋的相對(duì)偏移量來(lái)獲取相位差信息,其缺點(diǎn)是必須知道原場(chǎng)的分布特征才能夠恢復(fù)完整的波面[1-3]。相位展開(kāi)方法,優(yōu)點(diǎn)在于只需要一幅完整的、無(wú)波面缺損的干涉圖即可實(shí)現(xiàn)波面恢復(fù),全面獲取相位差信息[3,4]。相比之下,相移法的面形測(cè)量精度較高,其缺點(diǎn)是必須在同一方向上通過(guò)不同時(shí)間段獲取多幅干涉圖,所以不能應(yīng)用于瞬態(tài)干涉測(cè)試[5];而相位展開(kāi)方法雖然測(cè)量精度較低,但可以用于實(shí)時(shí)測(cè)量。對(duì)于工件的面形測(cè)量,由于環(huán)境振動(dòng)影響,可以采用是Hartman 波前傳感器,但是該儀器因測(cè)量原理上的限制,只能測(cè)量工件面形的空間低頻信息。相對(duì)而言,瞬態(tài)干涉測(cè)試在工件高頻面形偏差的測(cè)試中具有一定優(yōu)勢(shì)。利用GLAD 軟件,模擬菲索干涉儀得到工件面形的干涉圖樣,然后再讀入該圖片,利用相位展開(kāi)方法獲得了工件面形重構(gòu)結(jié)果。
1 干涉圖的波前恢復(fù)原理
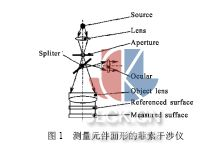
在光學(xué)測(cè)量中,被測(cè)量工件放置在樣品元件的下面,如圖1 所示。根據(jù)干涉理論,在元件測(cè)量中,菲索干涉儀得到的干涉條紋強(qiáng)度空間分布為[4]:

式中:a(x,y)和b(x,y)為干涉場(chǎng)背景光強(qiáng)和條紋對(duì)比分布;f0x、f0y 分別為兩個(gè)方向的空間載波頻率;φ(x,y) 為波面位相值。將公式(1)表述為復(fù)指數(shù)形式:
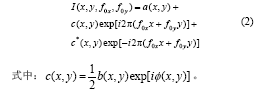
相位展開(kāi)方法的本質(zhì)是在分析干涉圖的光強(qiáng)分布特征的基礎(chǔ)上,對(duì)表征光強(qiáng)的灰度圖像運(yùn)用傅里葉變換獲得干涉圖的空間頻譜信息,通過(guò)空間載波的解調(diào),對(duì)由光學(xué)元件產(chǎn)生的波面變化進(jìn)行恢復(fù),得到元件面形的重構(gòu)結(jié)果。對(duì)表征公式(2)光強(qiáng)分布的灰度值圖像作二維傅里葉變換可得經(jīng)過(guò)相位調(diào)制的空間頻譜函數(shù)為:
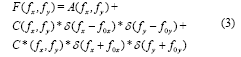
式中:F(fx,fy)、A(fx,fy)、C(fx,fy)分別為I(x,y)、A(x,y)、C(x,y)的傅里葉變換。公式(3)中包含三部分的內(nèi)容:第一項(xiàng)A(fx,fy)表征相干波面未經(jīng)過(guò)元件面形調(diào)制的空間頻譜;第二項(xiàng)為含相干波面信息的、以(f0x,f0y)為中心的頻譜函數(shù);第三項(xiàng)為含相干波面信息的、以(-f0x, -f0y)為中心的頻譜函數(shù)。相位物體引起的相位變化φ(x,y)的信息包含在第二、三項(xiàng)中。選擇適當(dāng)?shù)膄0x、f0y 值,在頻域中將給出3 個(gè)分離的譜瓣,在頻域內(nèi)利用濾波函數(shù)提取以(f0x, f0y)為中心的頻譜C(fx -f0x,fy -f0y),即可提取相位信息φ(x,y)。

式中:c(x,y)的的實(shí)部與虛部比值的反正切值就是波面相位,且無(wú)背景光強(qiáng)和條紋對(duì)比分布的影響,即波面相位為:

由公式(5)得到的恢復(fù)波面φ(x,y)可能不是連續(xù)的,而實(shí)際元件面形變化是連續(xù)的,所以需要通過(guò)相位展開(kāi)過(guò)程將φ(x,y)恢復(fù)連續(xù)波面相位φT (x,y),即發(fā)生了相位躍變處相位面上各點(diǎn)的相位相應(yīng)增加或減少2π。這種進(jìn)行相位累加的過(guò)程也稱(chēng)為相位解包。
2 仿真結(jié)果與分析
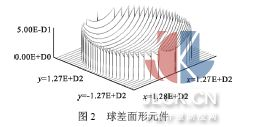
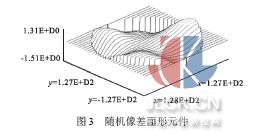
利用GLAD 軟件模擬一個(gè)帶有球差的元件面形和隨機(jī)像差的元件面形,兩元件的面形如圖2、圖3 所示,其中球差面形元件的均方根像差rms=0.1 533 441 λ,而隨機(jī)像差面形元件rms=0.3 540 679 λ。計(jì)算點(diǎn)陣為1 024×1 024。
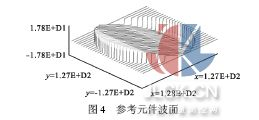
再模擬一個(gè)菲索干涉儀中無(wú)像差的標(biāo)準(zhǔn)鏡,其傾斜放置產(chǎn)生的參考波面如圖4 所示。
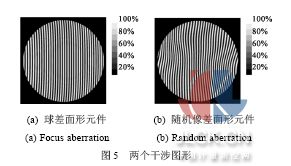
那么用菲索干涉儀器去檢測(cè)圖2、圖3 所示的元件時(shí),在理論上即是圖2、圖3 所示元件面形與圖4參考元件波面的干涉。由公式(1),通過(guò)干涉過(guò)程,將產(chǎn)生圖5 所示的干涉圖形。
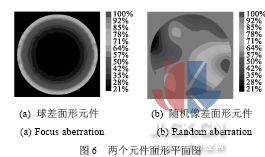
在程序中讀入圖5 所示的干涉條紋圖,由公式(5),通過(guò)相位恢復(fù)算法及相位展開(kāi)過(guò)程,實(shí)現(xiàn)干涉圖的波前恢復(fù),可以得到圖6 所示的面形平面圖,圖7 給出了兩個(gè)元件的面形立體圖。模擬結(jié)果顯示,球差面形元件的均方根像差rms=0.1 497 368 λ,與元件的初始面形像差基本相同;而隨機(jī)像差面形元件rms=0.2 772 484 λ,與元件的原始面形像差差異較大。對(duì)比圖7 與圖2、圖3,可以發(fā)現(xiàn)干涉圖波前恢復(fù)得到的面形立體圖,與元件的初始面形也存在一定失真。分析表明,這可能是計(jì)算點(diǎn)陣數(shù)量較少導(dǎo)致的采樣不足引起的,在傅里葉變換和解調(diào)過(guò)程中,出現(xiàn)了圖像信息的缺損。
3 結(jié) 論
文中介紹工件面形精確測(cè)量技術(shù)中干涉面形重構(gòu)方法,利用GLAD 軟件模擬了工件或光學(xué)元件在菲索干涉儀測(cè)試中得到的干涉圖,再由干涉圖,初步重構(gòu)了元件面形。模擬結(jié)果顯示:干涉圖波前恢復(fù)得到的面形,與元件的初始面形存在一定異。這種差異可能是計(jì)算點(diǎn)陣不足引起的。目前干涉測(cè)量技術(shù)也有進(jìn)一步發(fā)展,相移式干涉儀也在向瞬態(tài)測(cè)試方向發(fā)展。
摘自:中國(guó)計(jì)量測(cè)控網(wǎng)






