首頁>技術(shù)中心>技術(shù)資訊>基于經(jīng)緯儀的自調(diào)平臺海態(tài)水平度的測量
基于經(jīng)緯儀的自調(diào)平臺海態(tài)水平度的測量
發(fā)布時(shí)間:2017-09-01
引 言
水平度是角度量的參數(shù),海態(tài)水平度是動(dòng)態(tài)角度量。船在海上時(shí),具有縱搖,橫搖,和航向變化3個(gè)角運(yùn)動(dòng)以及航行、橫移、升沉3 個(gè)線運(yùn)動(dòng),共6自由度運(yùn)動(dòng),因此,不僅調(diào)平臺的水平度是動(dòng)態(tài)量,而且要在動(dòng)態(tài)環(huán)境下進(jìn)行測量。6 自由度運(yùn)動(dòng)都會產(chǎn)生線加速度,引起水平儀的運(yùn)動(dòng)敏感構(gòu)件誤動(dòng),因此成品水平儀在動(dòng)基座條件下都不能使用,海態(tài)水平度的測量需要研究新的方法和設(shè)備。
1 測量原理
測量海態(tài)水平度采用岸、船對瞄,幾何學(xué)內(nèi)錯(cuò)角相等則兩直線平行的原理,見圖1。
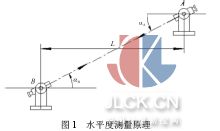
A 為岸上點(diǎn),B 為船上點(diǎn),兩點(diǎn)各架設(shè)一臺經(jīng)緯儀進(jìn)行對瞄,AB 為A 和B 的對瞄線,由于岸上經(jīng)緯儀可以精確調(diào)平,因此,αA 為AB 對A 點(diǎn)大地水平線的夾角,船上經(jīng)緯儀需拆去調(diào)水平底座,直接固定在調(diào)平臺上,因此,船上經(jīng)緯儀的水平度是由自調(diào)平工作臺確定的,是被測值,αB 為AB 對被測調(diào)平線的夾角,如無地球曲率影響,則|αA|=|αB|時(shí),工作臺調(diào)平線與大地水平線平行,即水平度誤差為零,當(dāng)有地球曲率影響時(shí),水平度誤差Δ 為:
式中:Δ α 為地球曲率對水平度影響的補(bǔ)償值。采用這種俯仰角相等的方法檢測水平度能適應(yīng)海態(tài)的環(huán)境條件,無論潮漲潮落,A 和B 兩點(diǎn)都能準(zhǔn)直。由于Δ α 恒為“+”值,αA,αB 的符號隨“正”、“倒”鏡狀態(tài)而不同,因此取絕對值。
2 地球曲率修正
由于地球在公里級距離時(shí)可近似看作為球體,在不同位置點(diǎn)上水平面為垂直于鉛垂線的平面,因此,不同位置的水平面相互間具有夾角,并不平行。當(dāng)兩點(diǎn)距離較近時(shí)該夾角值可以忽略不計(jì),但兩點(diǎn)位置較遠(yuǎn)時(shí),兩點(diǎn)水平面的夾角值會增大,所以必須予以修正。地球曲率修正見圖2。
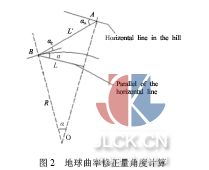
O 為地球曲率中心;R 為地球半徑;αB 為船上經(jīng)緯儀仰角;αA 為山上經(jīng)緯儀俯角。從圖中可以得到:
式中:Δα 為地球曲率修正量,°;L'為船上和山上點(diǎn)的斜距,由測距儀測出;L 為水平距離,km;αA為山上經(jīng)緯儀的俯角,(°);R 為地球半徑,km,取平均值6 370 km。誤差分析如下,將公式(2)微分得:
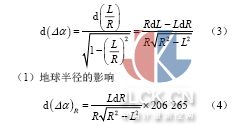
徑為6 356.912 km,對平均值最大誤差dR=13.1 km,水平距離L=1 km 時(shí),引起誤差0.07",因此,可忽略不計(jì)。
(2)測距誤差dL 的影響

如L 仍為1 km,距離的測量誤差為dL=31 m,造成角度的補(bǔ)償誤差為1"。
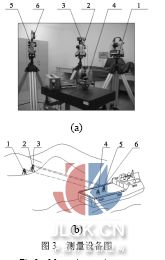
3 測量設(shè)備與方法
海態(tài)水平度測量設(shè)備采用成品經(jīng)緯儀加裝附件的辦法,見圖3,主要分為3 大部分:對瞄跟蹤、光同步采樣和激光測距。3(a)是測量設(shè)備,3(b)是設(shè)備布置。圖中,1 為對瞄經(jīng)緯儀TM5100A;2 為接受同步信號經(jīng)緯儀;3 為激光測距儀;4 為對瞄經(jīng)緯儀JTD2;5 為發(fā)射同步信號經(jīng)緯儀;6 為測距棱鏡組。為操作方便減少設(shè)備臺數(shù),同步采樣和激光測距裝成一體。對瞄跟蹤設(shè)備由兩臺經(jīng)緯儀組成。岸上為TM5100A,船上經(jīng)緯儀需選用不裝對線加速度敏感的電子水泡等元件的經(jīng)緯儀,現(xiàn)用JTD2 經(jīng)緯儀,并更改軟件,只提取垂直角,使輸出間隔時(shí)間由107 ms縮短至24 ms。兩臺經(jīng)緯儀的望遠(yuǎn)鏡中心都裝有30 mW紅光半導(dǎo)體激光器及聚光鏡,作為兩臺儀器對瞄時(shí)的目標(biāo);同步采樣也用兩臺經(jīng)緯儀,在船上JTD2 的望遠(yuǎn)鏡上裝有發(fā)射光信號的紅光半導(dǎo)體激光器(0.3 W)及光學(xué)系統(tǒng),岸上TM5100A 的望遠(yuǎn)鏡上裝有接收信號的光學(xué)系統(tǒng)及光敏三極管;光同步采樣裝置裝在經(jīng)緯儀望遠(yuǎn)鏡上是為了便于捕捉目標(biāo)及對準(zhǔn)。激光測距部分由測距儀和角錐棱鏡組組成,測距儀裝在接收信號TM5100A 的上面,棱鏡組裝在JTD2 經(jīng)緯儀上。
船上的發(fā)射激光器發(fā)出激光,用準(zhǔn)直法對準(zhǔn)山上接收經(jīng)緯儀上的接收光學(xué)系統(tǒng),使光敏三級管觸發(fā)。這時(shí)的三極管輸出為高電平信號,當(dāng)關(guān)閉發(fā)射激光器時(shí),三極管輸出轉(zhuǎn)變?yōu)榈碗娖健y量時(shí),船上和岸上的對瞄經(jīng)緯儀不斷進(jìn)行手動(dòng)跟蹤對瞄,采樣時(shí),按船上電源的采樣按鍵,同時(shí)完成兩個(gè)動(dòng)作:(1)電平跳變信號,使單片機(jī)進(jìn)行采樣,讀取電平跳變前、后(最靠近電平跳變)JTD2 二個(gè)垂直角讀數(shù)值,取平均值,輸至LED 數(shù)顯,平均值顯示時(shí)間保持10 s。(2)按鍵的接點(diǎn)使0.3 W 激光器斷電,激光器熄滅。岸上接收系統(tǒng)的光電三極管由接收到激光至激光熄滅,產(chǎn)生相應(yīng)輸出電平跳變,通過放大比較電路,在滅激光器的時(shí)刻,繼電器線圈通電,使連接TM5100A 微動(dòng)機(jī)構(gòu)+5 V 電源的常閉接點(diǎn)斷開。TM5100A 的微動(dòng)機(jī)構(gòu)失效,保持熄滅時(shí)的垂直角狀態(tài),0.3 s 后予以顯示。所得的垂直角讀數(shù),以及由測距儀測出的距離按公式(1)算出自調(diào)平工作臺水平度的值。
4 實(shí)驗(yàn)驗(yàn)證
為了驗(yàn)證海態(tài)水平度測量方案的正確性,進(jìn)行了以下實(shí)驗(yàn)驗(yàn)證:
(1) 靜態(tài)綜合誤差試驗(yàn)
在陸態(tài)實(shí)驗(yàn)時(shí),兩臺經(jīng)緯儀都能按大地水平面調(diào)水平,因此實(shí)驗(yàn)得到的誤差是整個(gè)測量設(shè)備和方法的靜態(tài)綜合誤差,包含了地球曲率補(bǔ)償及經(jīng)緯儀附件安裝的正確性。在距離為257 km 時(shí)進(jìn)行了20 次對瞄實(shí)驗(yàn), 試驗(yàn)結(jié)果, 最大值為5" , 平均值Δ=0.4",σ=2.5"。當(dāng)距離為1 km 時(shí),最大值為4.3"。
(2) 遠(yuǎn)距離時(shí)光同步激光束的光斑尺寸試驗(yàn)
光斑太大則能量損耗大,難以觸發(fā)光電三極管,太小又難以捕獲目標(biāo),為此進(jìn)行了光斑尺寸試驗(yàn)。調(diào)試時(shí)把光斑的長邊置于水平方向,以便于方位方向容易跟蹤,短邊置于垂直方向,以減小進(jìn)入觀察望遠(yuǎn)鏡的光能量。試驗(yàn)結(jié)果:在距離為750 m 時(shí),光斑尺寸長邊為800 mm,短邊為50 mm。
(3) 同步采樣陸態(tài)功能實(shí)驗(yàn)
試驗(yàn)結(jié)果:1 km 光同步采樣功能正常,同步時(shí)間小于1 ms。
(4) 海態(tài)手動(dòng)跟蹤對瞄試驗(yàn)
由于測量參數(shù)是角度,距離越遠(yuǎn),則角度的變化量越小,1 km 時(shí)手動(dòng)能正常跟蹤。經(jīng)以上實(shí)驗(yàn),證明海態(tài)水平度的測量原理正確,方案可行。
摘自:中國計(jì)量測控網(wǎng)






